対UAS防衛のための熱赤外線センサー設計上の考慮事項
事業計画概要
小型で低コストのドローンの利用は、軍事および公共安全の分野で急速に拡大しており、効果的な対無人航空機システム(C-UAS)ソリューションの必要性が急務となっています。このホワイトペーパーでは、EO/IRセンサーがC-UASキルチェーンのバックボーンを形成する方法の概要を説明し、低コストのイメージングシステムと高性能マルチセンサーアーキテクチャのトレードオフを比較します。また、長距離検知における課題についても取り上げており、この場合ドローンはわずか数ピクセルとしてしか表示されないことがあり、性能は信号対雑音比(SNR)によって制約されることを示しています。また、この論文では、従来のMTIとAIベースのオブジェクト検出の両方が、視認限界で限界があることを強調しています。最後に、SNRの改善、低コントラストターゲットの安定化、効果的な検出と追跡範囲の拡大における高度な画像信号処理(ISP)の本質的な役割を強調します。
序論および背景
ドローンの脅威は、戦術的および公衆安全のシナリオにまたがって顕在化しています。小型で安価かつ高い機動性を持つドローンの急増は、軍事計画担当者にとっても、また公共・商業・産業分野の脆弱な重要施設を保護するうえでも、大きな課題となっています。攻撃用ドローンとC-UASソリューションの間に軍拡競争があると言うのは誇張ではありません。
電気光学(EO)および熱赤外(IR)イメージングは、ドローンを検出および追跡するためのコア技術となっています。コスト/効果分析を行うためには、開発者はC-UASシステムの設計トレードオフを理解する必要があります。これには、検知距離の制約、レーダーシステムの能力、画像信号処理、組み込みプロセッサ、そして人工知能(AI)モデルなどが含まれます。各防空システムは特定の空中脅威に対応するために開発されていますが、そのキルチェーンは一般的に3つの複雑なサブシステム、センサーシステム、コマンド制御システム、および撃破システムで構成されています。
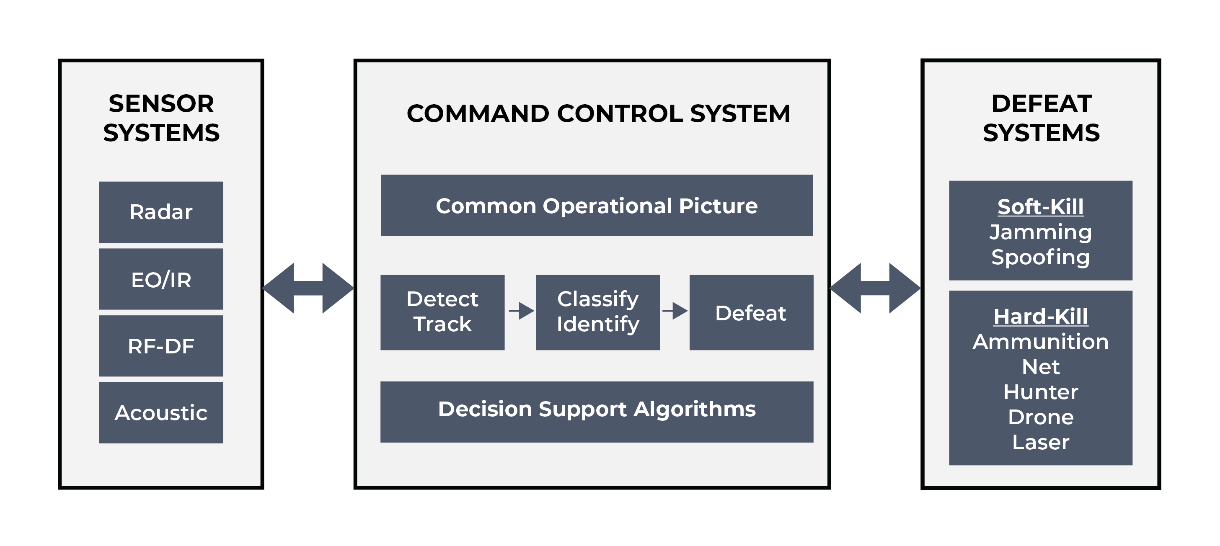
図1. ドローンの検出、追跡、識別、無力化のためのC-UASプロセス
ロシア・ウクライナ戦争はUASの革新を加速させる試金石となり、ドローンの能力と運用戦術の発展を急速に進めています。無線妨害、GPS信号妨害、および運動エフェクターなどの撃破システムは戦闘ラインに沿って配備されていますが、これらのシステムは高価であり、公共の安全アプリケーションへの配備は限られています。
ドローン検出用EO/IRイメージングシステム
コスト効果の高い電気光学(EO)センサーは、高解像度で適切な焦点距離のレンズを提供します。受動赤外線(IR)センサーは可視光ではなく熱光子放射に敏感であるため、IRは24時間365日稼働に最適です。EOカメラは角度解像度が高く、それがターゲット上のピクセルに直接反映されます。これは、早期のドローン検出に不可欠なシステムパラメータです。しかし、小さなドローン上のEOピクセルのSNRは、空の背景とのコントラストが限られているため、しばしば低くなります。赤外線カメラは、空の冷たい背景を考慮すると、2x2ピクセルのクラスタほど小さいドローンの動きを検出できることが多いです。さらに、形状、動きのパターン、熱シグネチャなどの分類手がかりにより、IRはドローンを鳥や航空機、背景ノイズ(クラッター)と区別でき、誤検知を最小限に抑えることができます。こうした誤検知は、しばしばイメージングシステムの有効性を低下させる要因となります。
C-UASソリューション設計に関する考慮事項
C-UAS検出システムは、コストとパフォーマンスの2つのカテゴリ、すなわち低コストと高性能に分類されます。ドローン検知距離が1,000メートル程度で、より低コストなイメージング専用検知システムは、固定焦点レンズを備えたEOおよび長波長赤外線(LWIR)非冷却センサーを統合しており、価格は 5万ドル~15万ドルの範囲となります。通常、これらのシステムは視野角(FOV)または水平90~180度のスキャンに制限されており、周辺監視に便利です。検知距離1,000メートルの先進的な高性能マルチセンサー検知システムでは、連続ズーム(CZ)光学系を備えたEOカメラおよび冷却型中波赤外線(MWIR)カメラ、ならびにレーダーを統合しています。これらのシステムのコストは15万~100万ドルで、状況認識を最大化するために完全な360度のFOVを提供するように構成できます。
通常、低コストのC-UASソリューションには、以下の要素が含まれます。
- 長焦点またはズーム光学系を備えたEOおよび非冷却LWIR赤外線カメラ
- 固定設置またはパン・チルト架台
- 物体の検出と追跡のための組み込みコンピュータ
- 撃破システム(通常はRFジャミング)
通常、高性能C-UASソリューションには、以下の要素が含まれます。
- 長距離対応の連続ズーム(CZ)光学系を備えたEOカメラおよび冷却型MWIRカメラ
- 伸縮式マストを備えた固定または移動式プラットフォームに搭載された、パン・チルト機構または安定化ジンバル
- カメラのスルー制御に使用される、広域・高解像度のレーダーユニット
- 音響センサー
- サーバーまたはPCベース
- 撃破システム – キネティック方式を含むあらゆるタイプ
 図2. 低コスト C-UAS
図2. 低コスト C-UAS
EOカメラを選択する際には、色対モノクロ、最大200MPの解像度、ローリング対グローバルシャッターなど、考慮すべき仕様が多数あります。ピクセルレート、エッジ側の組み込み信号処理、ビットレート、感度、レンズ選択などについては、システムレベルでのトレードオフが存在します。EOシステムは、IRカメラと比べてターゲット上の解像度およびピクセル数が2倍から8倍多く得られますが、検知距離の性能はSNRに依存します。


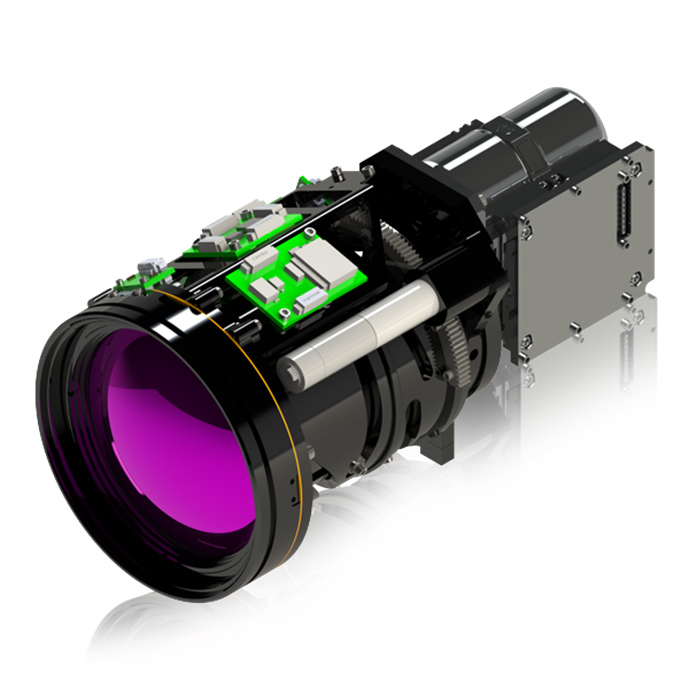
図3. 固定73 mm LWIR(左)、14~75 mm CZ LWIR(中央)、15~300 mm CZ MWIR(右)
非冷却LWIRサーマルカメラを選択する場合、ほとんどのシステムでは、温度感度が20ミリケルビン(mK)以下の640x512解像度のセンサーと、F値が0.9~1.4の高速光学系が指定されています。これは、焦点距離とほぼ等しいレンズ開口(直径)に変換されますが、より長い焦点距離とズーム範囲には、実用的なサイズ制限があります。また、焦点距離が約250mmを超える場合には、非冷却LWIRから冷却MWIRへとコスト面での優位性が逆転するポイントも存在します。
最新のMWIRシステムには、低電力で動作する最大27,000時間のMTTF(平均故障時間)を備えたコンパクトな閉サイクルクーラーが組み込まれています。このセンサ技術は非冷却LWIRよりもはるかに感度が高いため、ƒ5.5ほど低速な光学系を使用することができ、レンズアセンブリを管理可能なサイズとコストに保ちながら、焦点距離を1000 mm以上確保できます。最新の冷却MWIRセンサーは、最大1280x1024の解像度と30 mKの感度を持つ8ミクロンピクセルを備えています。
低SNRでのEO/IR移動ターゲット指示
EO/IR C-UASシステムでは、移動ターゲット指示(MTI)アルゴリズムを第一段階として使用し、フレーム差分や時間差分、背景差分などの手法を用いて移動目標を検出します。検知限界付近では、ノイズと実際の動きを区別することが難しくなります。特に高ゲイン設定や低照度環境では、ピクセルレベルのノイズの揺らぎがフレーム間で小さな移動物体のように見えることがあります。また、揺れる植物、雲、水面、熱によるゆらぎ、影などの背景の動きも、「誤った動き」として検出される原因となります。検出しきい値を引き上げることで誤検知は抑えられますが、視認限界付近では真の検出も過度に抑制されてしまう可能性があります。
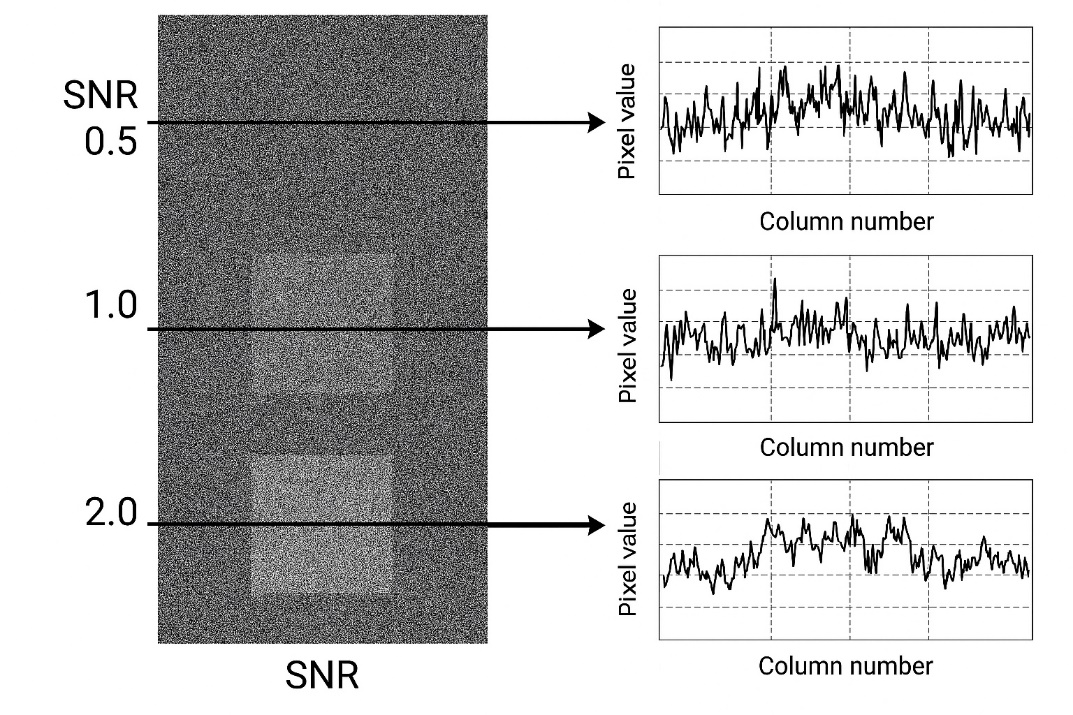
図4. SNRグラフィックの例
MTI検出では、誤検出が多く発生します。MTI検出を蓄積し、階層内で検出を定量化することは良い方法です。その後、ユーザーは早期検知の優先度と許容可能な誤検知の水準とのバランスを考慮しながら、システムの感度をどの程度に設定するかを決定できます。カメラは多くのノイズ由来の「ブロブ」やマイクロトラックを生成するため、それらを確認・検証する必要があります。運用時には、検知限界付近でのMTIは、多くの場合、AIによる物体検出器やターゲット追跡器のための候補生成器として機能します。
EO/IR物体検出器を使用したターゲット検出および追跡
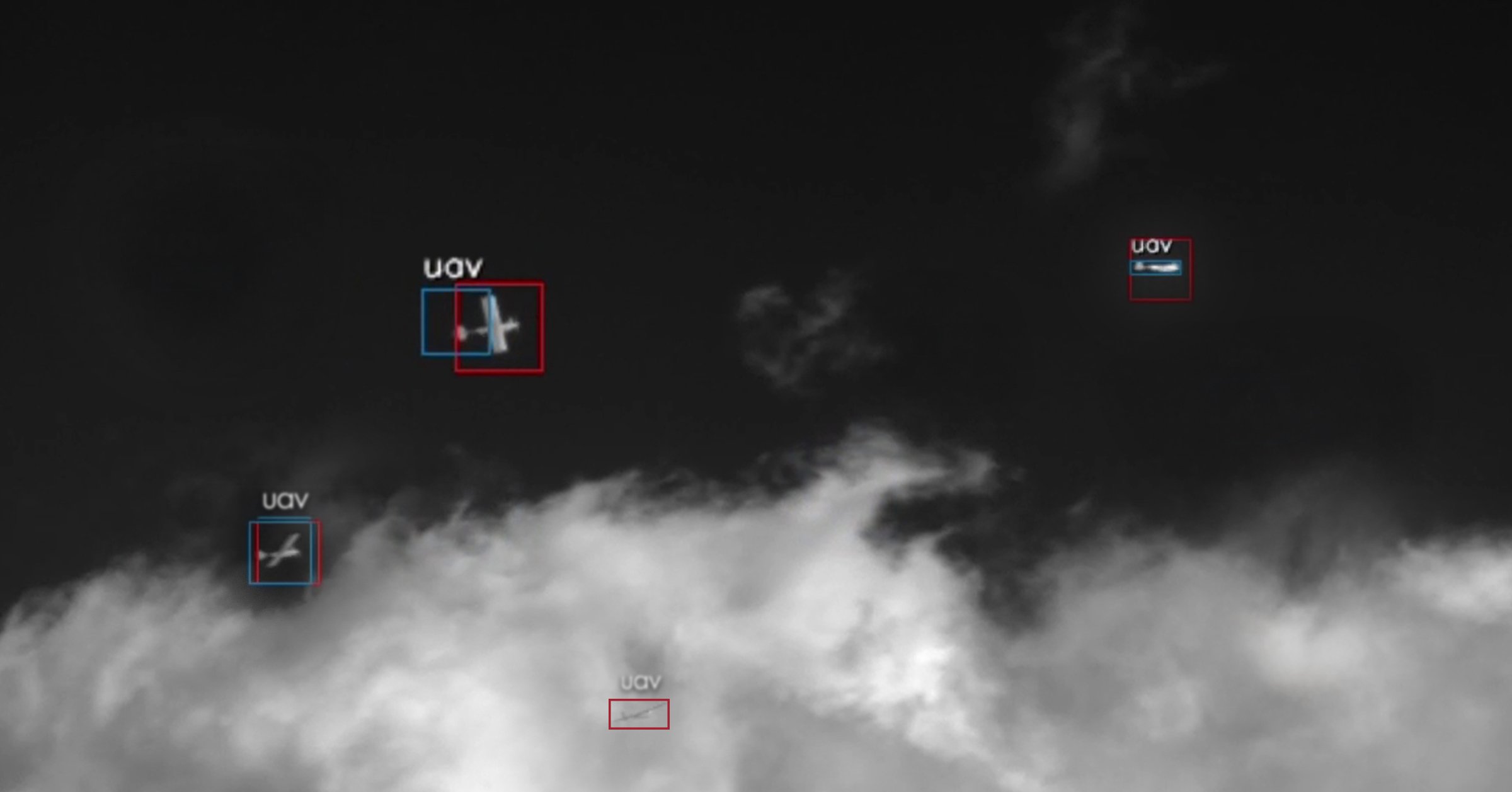
ディープラーニング、AIベースの物体検出器は、EO/IRビデオシステムでのドローン検出に広く使用され、検出、認識、識別といった人間の知覚に基づく分類体系に沿って運用することができます。それらには、マルチスケール特徴抽出が組み込まれています。
- 検出(>10x10 ピクセル):限られた学習データに基づき、小型から大型までのターゲットに対して、汎用分類(ドローン vs. 鳥 vs. 航空機)と位置特定(バウンディングボックス)を行います。
- 認識(約20x10 ピクセル):クアッドコプター、固定翼ドローン、空中ISR機などのターゲットクラスを対象とした詳細分類(ファイングレイン分類)。
- 識別(約30x20 ピクセル):Shahed、クアッドコプターのメーカーや機種、固定翼の徘回型目標など、用途特化クラスの高解像度データを使用した詳細分類

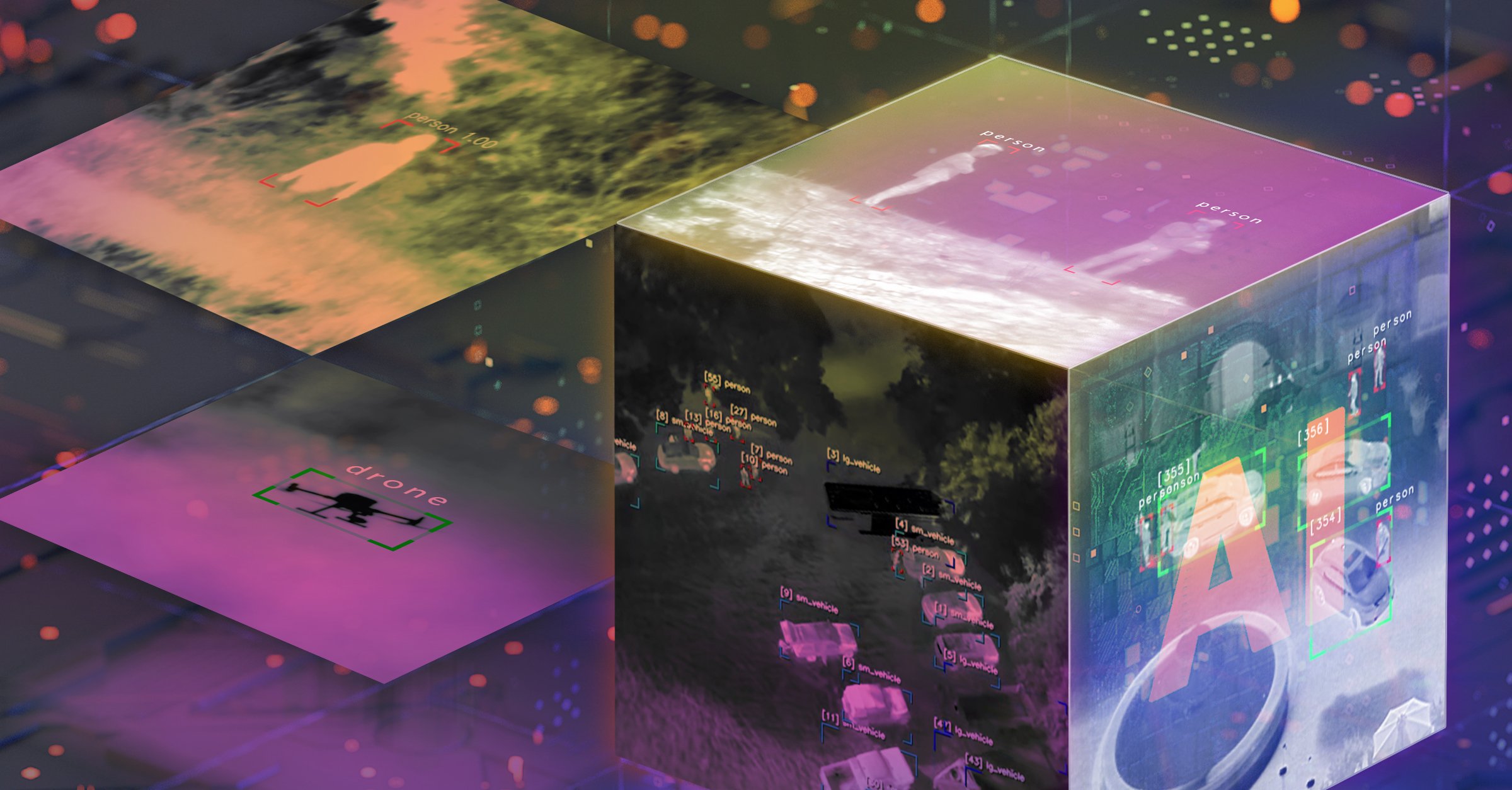
図5. ドローン検知ビデオパイプライン
EO/IRの検出限界
長距離にあるドローンの場合、EO/IRの性能はしばしばSNRと解像度によって制約され、システムは検知限界付近での運用を余儀なくされます。小型のクアッドコプターや固定翼ドローンでは、長距離では角サイズがわずか数ピクセル、あるいはサブピクセルレベルになる場合があります。その場合、ドローンの見かけ上のサイズは、光学系の点拡がり関数(PSF)と同程度、あるいはそれより小さくなります。散乱、ヘイズ、乱流などの大気の影響は、コントラストをさらに低減し、ランダムなぼやけを引き起こす可能性があります。検知限界の条件は、一般的に次のような状態に対応します。
- SNR:ピクセルまたは小さな領域レベルで低SNR(1~3)
- エリア:見かけ上の面積が非常に小さい(20ピクセル未満)
- 背景:ドローンが樹木、建物、雲などの複雑な背景を横切る際に、断続的にしか視認できない。
ほとんどの物体検出器は、対象物が約10×10ピクセル未満になると性能が大きく低下します。3×3ピクセルから最大5×5ピクセル程度では、ネットワークが取得できる詳細情報はほとんどなく、形状の手がかりは限られ、テクスチャは存在せず、粗い動きやコントラスト情報しか残りません。ネットワークの学習に、非常に小さくノイズの多いターゲットが含まれていない場合、検出器はターゲットを見逃したり、不安定な出力を生成したりする可能性があります。クリーンな昼間画像、特定の背景、強いコントラストを持つ対象を使用して学習された検出器は、低照度や夜間、靄や高湿度の環境、また背景の違い(例:砂漠、都市、海上)において、特に性能低下を起こしやすく、場合によっては機能しなくなる可能性があります。
検知限界付近では、学習データ分布と実運用環境とのわずかな不一致でも、その影響が大きく増幅されます。非常に小さなターゲットに対しては、学習データのラベル付けと注釈付けの方法が非常に重要になります。手動での注釈付けには、誤りが生じやすいという問題があります。バウンディングボックスは、真のターゲットと一致せず、極端な距離ではターゲットを完全に見逃す可能性があります。これにより、検出器を混乱させ、低SNRで微妙な区別を学習する能力を制限するラベルノイズが発生します。
さらに、学習データには、小型で強くぼやけたドローンの例がほとんど含まれていません。ほとんどのCNNネットワークは、鮮明なターゲットや中程度にぼやけたターゲットに偏っています。特に長距離や移動プラットフォームでは、ぼやけやカメラの動きがEO/IRドローン検出の主な制約となります。検出に基づく追跡パイプラインは、位置とサイズが一貫している検出に依存します。ぼやけはジッタとサイズの変動を引き起こし、データの関連付けを損ないます。KLT特徴追跡やテンプレートマッチングなどの受雷型のトラッカーは、ぼやけの方向や強さによってテンプレート内部の外観が大きく変化すると、追跡が困難になります。
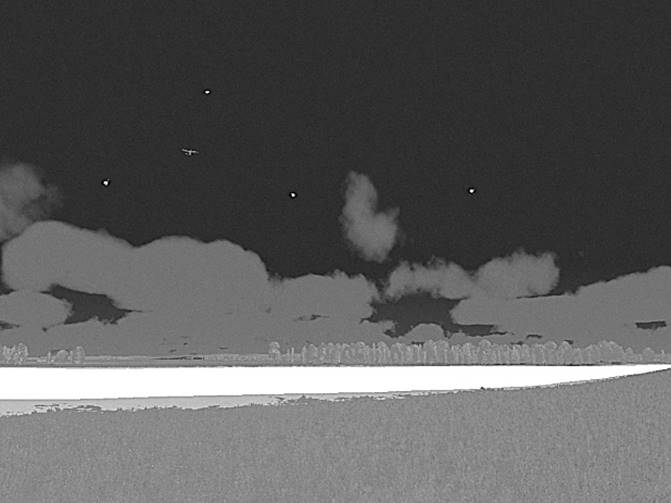

図6. 長距離における固定翼機およびクアッドコプターのEO/IR合成シミュレーション
パフォーマンスを向上させるために、開発チームはスケーリング、ノイズ注入、ぼやけ、照明の変更などのデータ拡張を使用できます。合成データを使用した学習では、ドローンモデルを現実的な背景にレンダリングしたり、鳥、航空機、背景クラッターなどのネガティブ例を含めることが可能になります。マルチフレームまたはトラック認識検出器は、単一フレームではなくシーケンスを使用して利用できます。
EO/IR画像シグナル処理
EO/IRカメラシステムにおけるISPとは、生のセンサーデータを、検出、認識、識別、測定、および自動意思決定を支える高品質で利用可能な画像へ変換するためのアルゴリズムおよびハードウェア機能の集合を指します。EO/IRシステム、特に熱赤外線カメラでは、焦点面アレイ(FPA)からの生出力はノイズが多く、非線形で未補正です。ISPは、この生データをリアルタイムで安定した、校正済みかつ視覚的に最適化された画像へと変換します。また、SNR、およびニューラルネットワークの性能と信頼性は、ターゲットの検出・認識・識別(DRI)を向上させるためのISPの品質に大きく依存します。Teledyne FLIR OEMは、SNRを改善し、検出限界(約2x1.5 ピクセル)においてドローン追跡を開始するための範囲を最大20%増加させるIR ISPアルゴリズムを開発しました。詳細については、www.oem.flir.com/prism-familyにアクセスしてください。
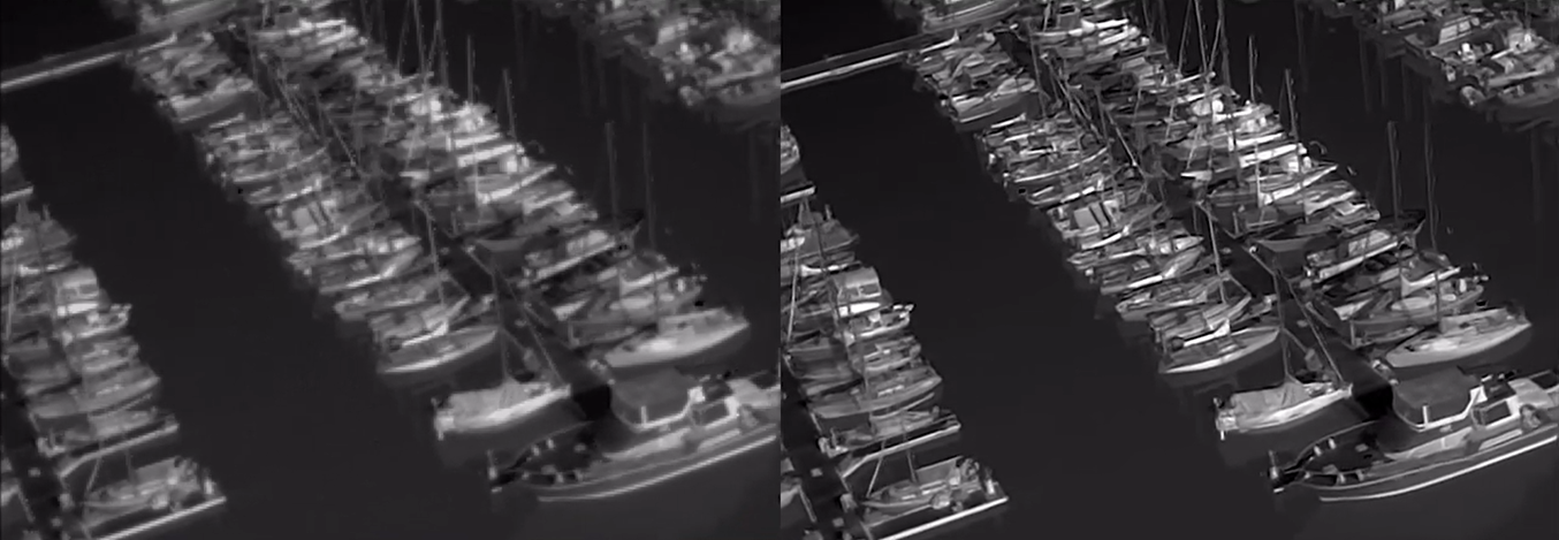
図7. Teledyne FLIR OEM ISP超解像度の例
関連記事
-
 アプリケーションノート
アプリケーションノート
A Guide on Cost-Effective Thermal Lens Integration: What to Know for Defense and Autonomous Vehicle Applications
詳細を見る -
 ホワイトペーパー
ホワイトペーパー
AI Detection, Target Tracking, and Computational Imaging on Embedded Processors
詳細を見る -
 記事
記事
Simplify MWIR Development with Neutrino Featuring InVeo Electronics
詳細を見る