Come applicare il dewarping su Lepton® 3.1R e Lepton UW
1 Introduzione
I modelli Lepton 3.1R e Lepton UW a infrarossi (IR) utilizzano rispettivamente un campo visivo largo 95° (WFOV) e un obiettivo WFOV a 160°. La distorsione del cilindro viene creata dall'obiettivo WFOV, che ingrandisce il centro dell'immagine leggermente più dei bordi. In questo modo le linee dritte sembrano curvarsi intorno al bordo dell'immagine. La distorsione del cilindro è indesiderabile per molte applicazioni di imaging. Questa nota applicativa descrive l'applicazione della correzione della distorsione (dewarping) sulle uscite Lepton 3.1R e Lepton UW utilizzando le funzioni integrate OpenCV.

2 Distorsione immagine
2.1 Panoramica
Un obiettivo WFOV consente all'imager di acquisire più immagini in una scena, ma causerà distorsione, rendendo gli oggetti deformati. In genere, in una termocamera possono esistere due tipi di distorsione: radiale e tangenziale. La distorsione radiale si verifica quando le linee dritte si curvano verso l'interno o verso l'esterno dal centro, mentre la distorsione tangenziale si verifica quando l'obiettivo viene inclinato rispetto al piano dell'immagine e l'immagine appare distorta. Per correggere la distorsione dell'obiettivo, calibrare la telecamera per calcolare le matrici di trasformazione, che correggono la mappatura della telecamera nel piano dell'immagine.
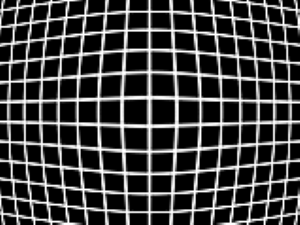
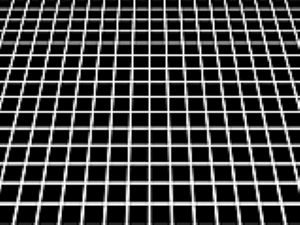
FIGURA 1. DISTORSIONE RADIALE (SINISTRA) E DISTORSIONE TANGENZIALE (DESTRA)
La procedura di calibrazione varia leggermente in termini matematici tra Lepton 3.1R e Lepton UW. Hanno obiettivi diversi, quindi non acquisiscono lo stesso tipo di distorsione geometrica. Sebbene entrambe sembrino avere una distorsione radiale, le immagini Lepton 3.1R sono costituite da bordi lineari, mentre Lepton UW ha bordi circolari, comunemente noti come effetto fisheye. La mappatura del contenuto della scena in linee dritte per Lepton UW è più complessa a causa dei bordi estremamente deformati. Diversi modelli di distorsione corrispondenti al tipo di obiettivo sono incorporati per la calibrazione per compensare questa distinzione: un modello grandangolare di distorsione rettilinea per Lepton 3.1R e un modello di distorsione fisheye per Lepton UW.
2.2 Applicazione della trasformazione del dewarp
Per correggere qualsiasi distorsione dell'obiettivo con il metodo OpenCV, le telecamere vengono calibrate catturando i modelli di test per modellare la distorsione. Acquisire i modelli di calibrazione utilizzando una termocamera è difficile, quindi si consiglia di utilizzare le matrici predefinite che caratterizzano la distorsione della termocamera di seguito. Una breve guida su come acquisire il modello di calibrazione è descritta nella Sezione 2.3.
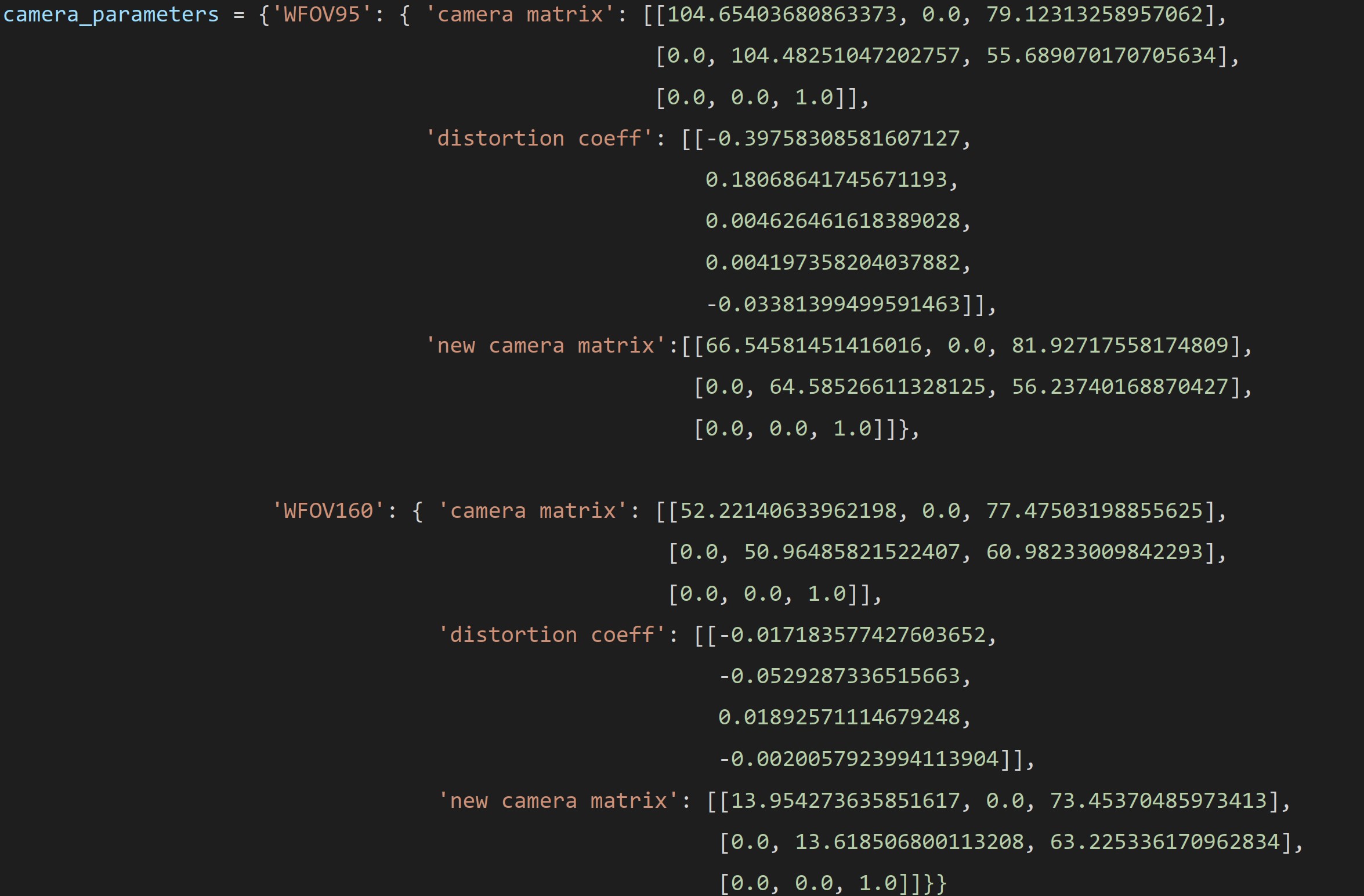
FIGURA 2. MATERIALI PER TELECAMERE
Queste matrici, insieme all'immagine di input, vengono passate come immagine degli argomenti nella seguente funzione integrata OpenCV per correggere la mappatura del piano tra telecamera e immagine. Un codice di esempio in Python per la dimostrazione è fornito nella Sezione 2.4.
Lepton 3.1R:
Lepton UW:

Si noti che sono presenti una matrice di telecamere e una nuova matrice di telecamere. Entrambi rappresentano parametri intrinseci della telecamera; l'unica differenza è che la matrice della telecamera definisce i parametri intrinseci originali della telecamera, mentre la nuova matrice della telecamera ridimensiona e sposta la matrice originale della telecamera. Senza specificare la nuova matrice della telecamera nella funzione di non distorsione, utilizza la matrice della telecamera per impostazione predefinita, che genera un'immagine rettilinea con lo stesso IFOV del suo ingresso. Il compromesso per ottenere linee dritte è che alcuni pixel negli angoli dell'immagine in ingresso vengono persi. L'applicazione della nuova matrice di telecamere con versione all-pixel mostrata sopra offre la possibilità di mantenere tutti i pixel dall'ingresso, ma introduce pixel neri intorno ai bordi. Le Figure 3 e 4 mostrano l'ingresso del campione e le possibili uscite.
![]()
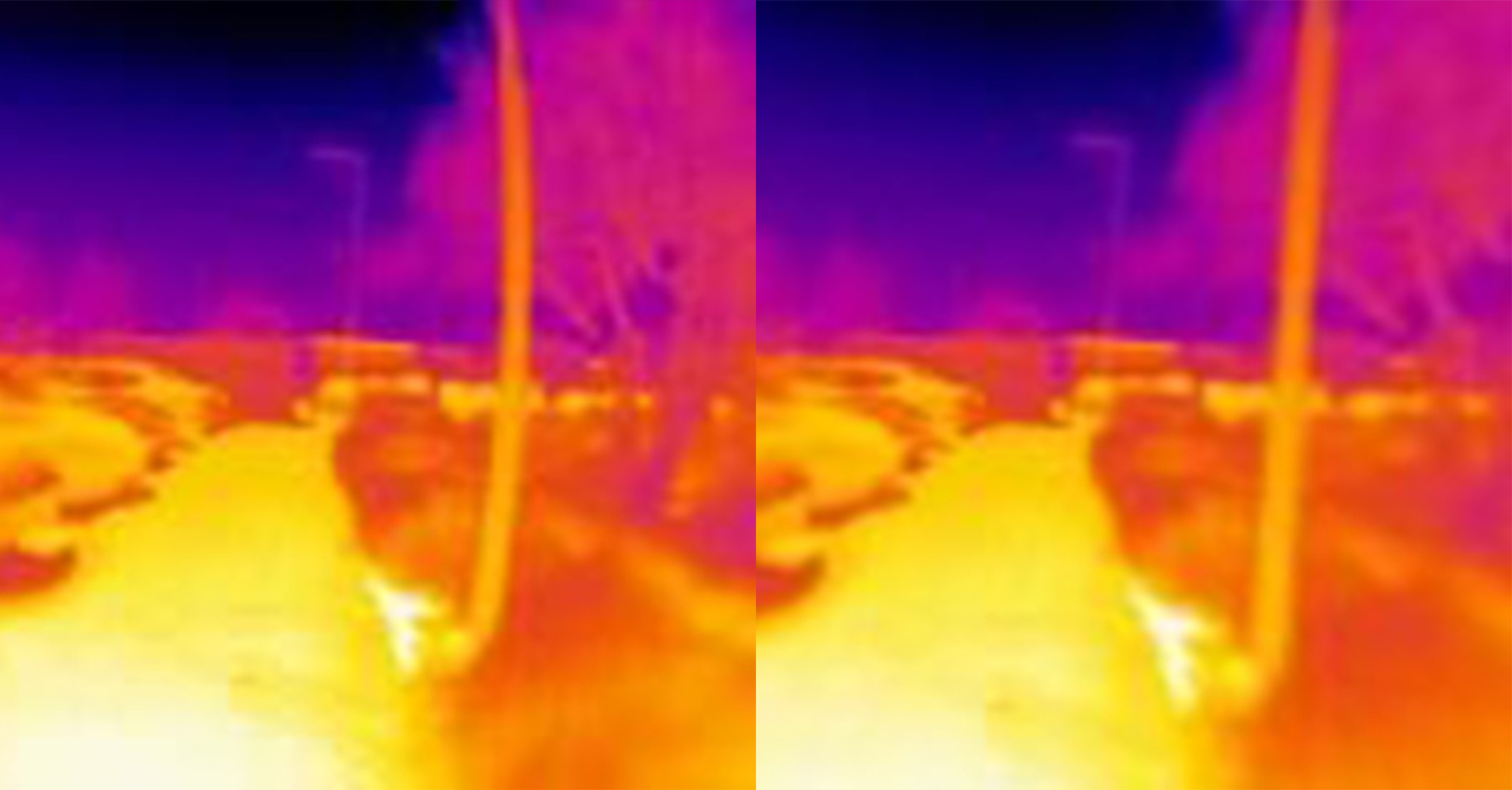
FIGURA 3. LEPTON 3.1R - ORIGINALE (SINISTRA), USCITA RETTILINEA (CENTRO) E USCITA VERSIONE TUTTI I PIXEL (DESTRA)


![]()
FIGURA 4. LEPTON UW - ORIGINALE (SINISTRA), USCITA RETTILINEA (CENTRO) E USCITA VERSIONE TUTTI I PIXEL (DESTRA)
2.3 Calibrazione della termocamera
Poiché il sito web OpenCV fornisce una spiegazione approfondita e un codice applicativo campione del processo di calibrazione, questa nota applicativa non copre i dettagli. La documentazione è disponibile all’indirizzo https://docs.opencv.org/3.4/d4/d94/tutorial_camera_calibration.html.
Come introdotto nella sezione 2.2, acquisire i pattern di calibrazione in IR non è semplice. Seguire la guida seguente per acquisire immagini efficaci per la calibrazione della termocamera.
1. Configurazione
- Utilizzare uno schema di calibrazione a griglia circolare, in quanto non è ideale visualizzare una scacchiera termica. Le griglie circolari asimmetriche o simmetriche funzionano.
- Si consiglia una griglia circolare 8x8.
- Una stampa cartacea del modello di calibrazione incollato su cartone e brevemente illuminato con luci ad alta energia, o il sole, può creare un contrasto termico.
2. Cattura
- Avere almeno una griglia circolare 6x6 per Lepton 3.1R e una griglia circolare 4x4 per Lepton UW visibile nell'acquisizione.
- Alcuni cerchi possono essere sfocati vicino ai bordi dell'immagine a causa del WFOV.
- Ogni cattura della griglia circolare deve occupare solo parti del FOV.
- La raccolta delle acquisizioni deve coprire la maggior parte delle aree del FOV, vale a dire una o due acquisizioni della griglia circolare vicino al centro e da otto a dieci acquisizioni intorno al bordo del FOV.
- Da dieci a dodici acquisizioni totali forniranno una calibrazione ottimizzata e ulteriori acquisizioni non sono vantaggiose.
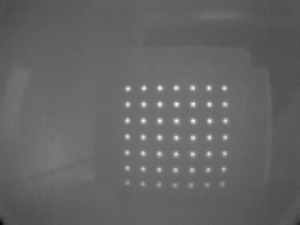
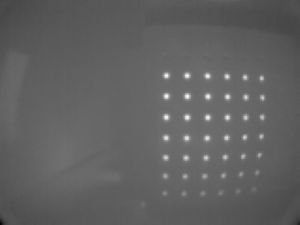
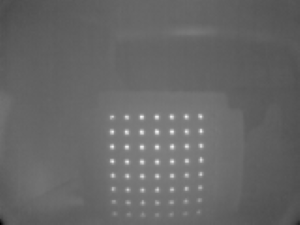
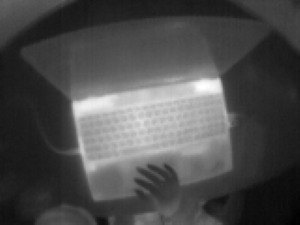
FIGURA 5. CENTRO (SINISTRA), IN BASSO A DESTRA (CENTRO) E IN BASSO AL CENTRO (DESTRA) CATTURA IL MODELLO DI CALIBRAZIONE LEPTON 3.1R
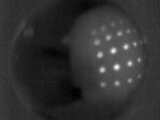
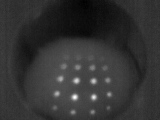
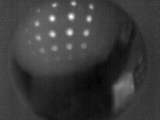
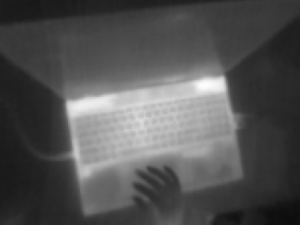
FIGURA 6. CENTRO (SINISTRA), IN BASSO A DESTRA (CENTRO) E IN BASSO AL CENTRO (DESTRA) ESEMPIO DI ACQUISIZIONE DEL PATTERN DI CALIBRAZIONE LEPTON UW
2.4 Supporto
Lo script di esempio Lepton_Dewarp_example.py1 può essere scaricato qui.
Per assistenza tecnica, visita il Centro di assistenza FLIR all'indirizzo http://support.flir.com.
