Considerações sobre o projeto de sensores térmicos infravermelhos para defesa contra drones
Faça o download da versão em PDF
Resumo executivo
O uso de drones pequenos e de baixo custo se expandiu rapidamente em ambientes militares e de segurança pública, criando uma necessidade urgente de soluções eficazes de sistema aéreo não tripulado (C-UAS). Este artigo descreve como os sensores de IV/EO formam a espinha dorsal da cadeia de destruição C-UAS e compara as compensações entre sistemas de imagem de baixo custo e arquiteturas multissensor de alto desempenho. Ele destaca os desafios da detecção de longo alcance, onde os drones podem aparecer como apenas alguns pixels, e o desempenho é restrito pela relação sinal-ruído (SNR). O artigo também enfatiza as limitações da MTI clássica e da detecção de objetos baseada em IA na borda da visibilidade. Por fim, ela destaca o papel essencial do Processamento de Sinal de Imagem (ISP) avançado na melhoria da SNR, estabilização de alvos de baixo contraste e extensão da detecção eficaz e da faixa de rastreamento.
Introdução e histórico
A ameaça ao drone está surgindo em cenários táticos e de segurança pública. A proliferação de drones pequenos, baratos e manobráveis é um grande desafio para planejadores militares e para a proteção de vulnerabilidades públicas, comerciais e industriais. Não é uma hipérbole afirmar que há uma corrida armamentista entre drones ofensivos e soluções C-UAS.
As imagens eletro-ópticas (EO) e termográficas infravermelhas (IR) tornaram-se tecnologias essenciais para detectar e rastrear drones. Para realizar uma análise de custo/benefício, os desenvolvedores precisam entender o espaço comercial dos sistemas C-UAS, incluindo limitações de alcance de detecção, recursos do sistema de radar, processamento de sinal de imagem, processadores integrados e modelos de inteligência artificial (IA). Embora cada sistema de defesa aérea seja desenvolvido contra um conjunto específico de ameaças aéreas, suas cadeias de destruição normalmente consistem em três subsistemas complexos: Sistemas de sensores, sistema de controle de comando e sistemas manipuladores.
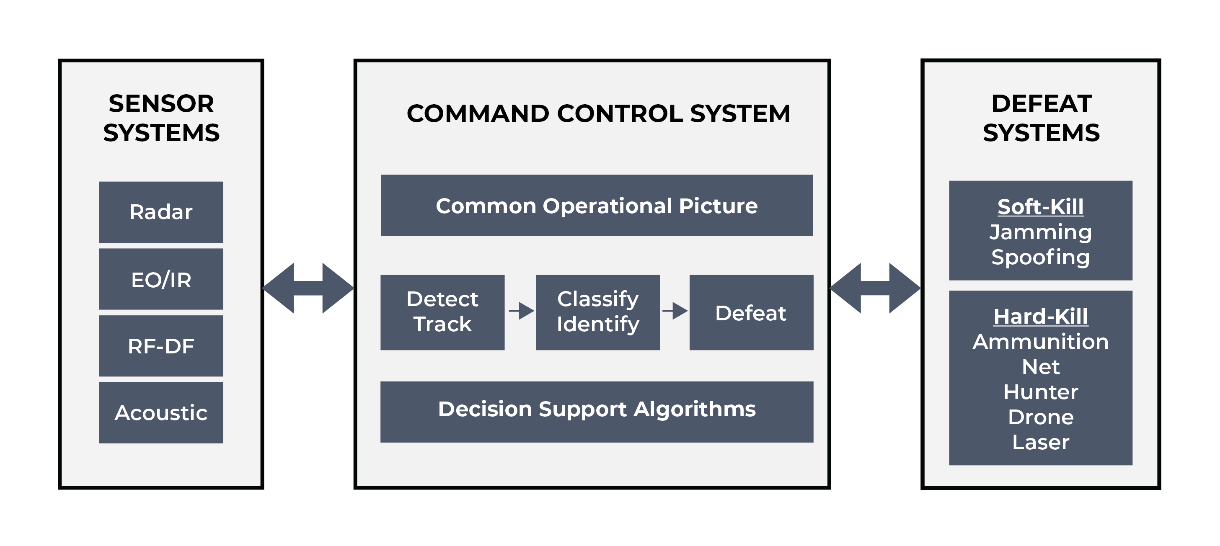
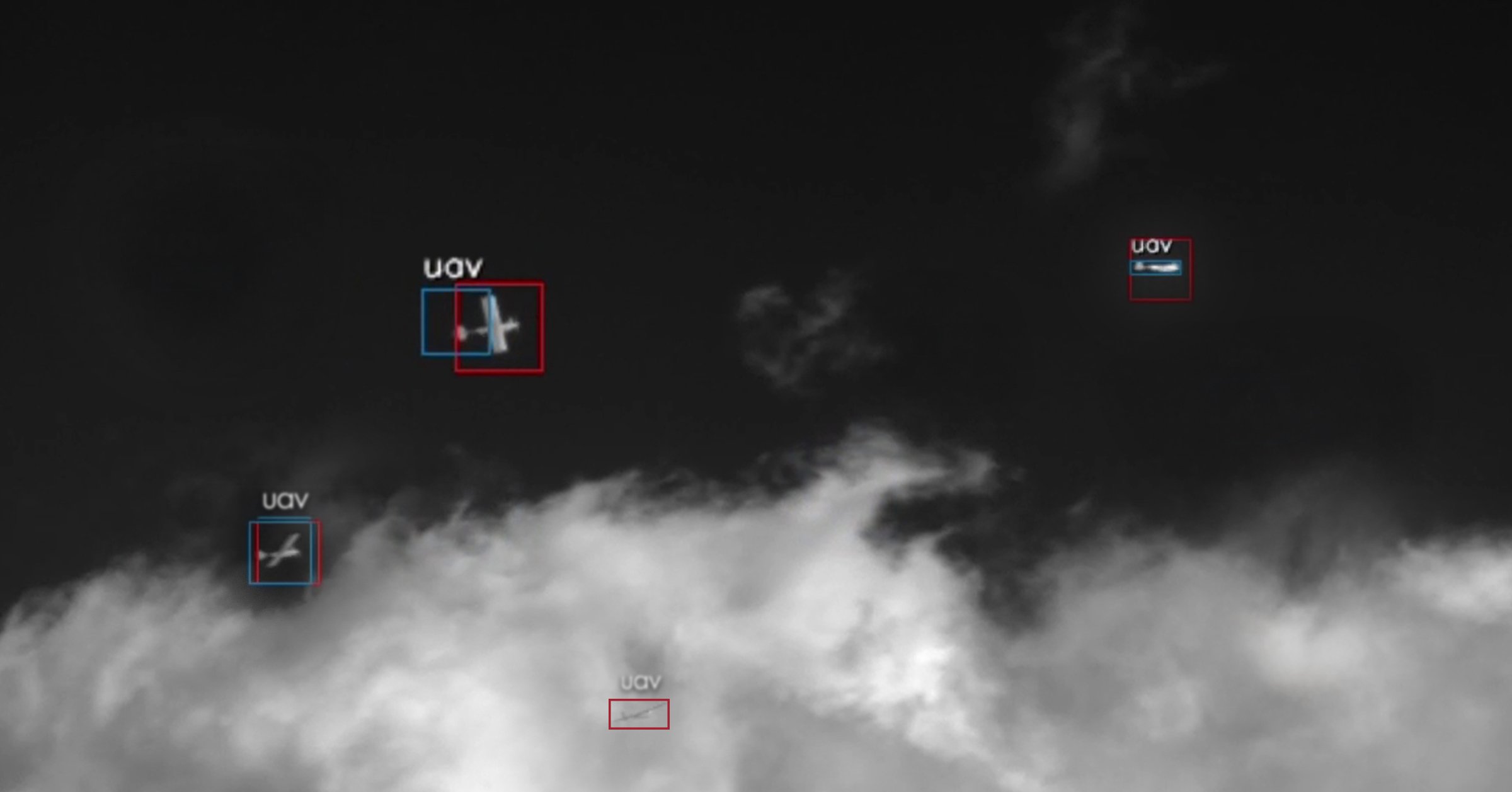
Figura 1. Processo C-UAS para detectar, rastrear, identificar e neutralizar drones
A guerra entre Rússia e Ucrânia tornou-se um cadinho para a inovação dos drones, acelerando os recursos e táticas dos drones. Embora sistemas manipuladores, como bloqueio de rádio, bloqueio de sinal GPS e efetores cinéticos, sejam implantados ao longo das linhas de batalha, esses sistemas são caros e têm implantação limitada em aplicações de segurança pública.
Sistemas de Imagens de IV/EO para Detecção de Drones
Sensores eletro-ópticos (EO) econômicos oferecem lentes de alta resolução e comprimento focal apropriado. Os sensores infravermelhos (IV) passivos são sensíveis às emissões térmicas de fótons em vez de luz visível, tornando o IV ideal para operações 24 horas por dia, 7 dias por semana. As câmeras EO têm resolução angular mais alta, o que se traduz diretamente em pixels no alvo: este é um parâmetro crítico do sistema para a detecção precoce de drones. No entanto, a SNR dos pixels de EO em um drone pequeno é frequentemente baixa devido ao contraste limitado contra um fundo do céu. As câmeras de IV muitas vezes podem detectar o movimento do drone representado por um pequeno cluster de 2x2 pixels, dado o fundo frio do céu. Além disso, dicas de classificação, incluindo forma, padrões de movimento e assinaturas térmicas, ajudam o infravermelho a distinguir drones de aves, aeronaves e bagunça para minimizar falsos positivos, o que muitas vezes diminui a eficácia dos sistemas de imagem.
Considerações sobre o design da solução C-UAS
Os sistemas de detecção C-UAS se enquadram em duas categorias separadas de custo e desempenho: menor custo e alto desempenho. Sistemas de detecção de baixo custo e somente por imagem com distância de detecção de drone <1.000 metros integram sensores no refrigerados de iv de eo e longa onda lwir com lentes de distncia focal fixa e custo entre us50.000 e us150.000. esses sistemas normalmente so limitados a um campo de viso fixo fov ou varredura horizontal de 90 a 180 graus o que til para o monitoramento do permetro. sistemas de deteco avanados de alto desempenho e multissensor com alcance>1.000 metros incorporam câmeras de IV de onda média (MWIR) refrigeradas e EO com zoom contínuo (CZ) óptico e radar. Esses sistemas custam entre US$ 150 mil e US$ 1 milhão e podem ser configurados para fornecer um campo de visão completo de 360 graus para máxima consciência situacional.
As soluções C-UAS de baixo custo normalmente incluem o seguinte:
- Câmeras de infravermelho EO e LWIR não refrigeradas com óptica de zoom ou de longa distância focal
- Montagem fixa ou panorâmica e inclinada
- Computador integrado para detecção e rastreamento de objetos
- Derrote o sistema, normalmente emperramento por RF
As soluções C-UAS de alto desempenho normalmente incluem o seguinte:
- Câmeras MWIR de EO e refrigeradas com óptica CZ de longo alcance
- Panorâmica e inclinação ou eixo pivotante estabilizado em plataformas fixas ou móveis com mastros extensíveis
- Unidades de radar de área ampla e alta resolução usadas para a câmera slew to cue
- Sensores acústicos
- Baseado em servidor ou PC
- Sistemas manipuladores – todos os tipos, incluindo cinética
 Figura 2. C-UAS de baixo custo
Figura 2. C-UAS de baixo custo
Ao selecionar uma câmera EO, há muitas especificações a considerar: cor versus monocromática, resoluções de até 200MP e rolagem versus obturador global. Há negociações no nível do sistema para taxa de pixels, processamento de sinal integrado na borda, taxa de bits, sensibilidade e seleção de lentes. Os sistemas de EO fornecem de 2 a 8 vezes mais resolução e pixels no alvo do que uma câmera de IV, mas o desempenho da faixa de detecção é uma função da SNR.


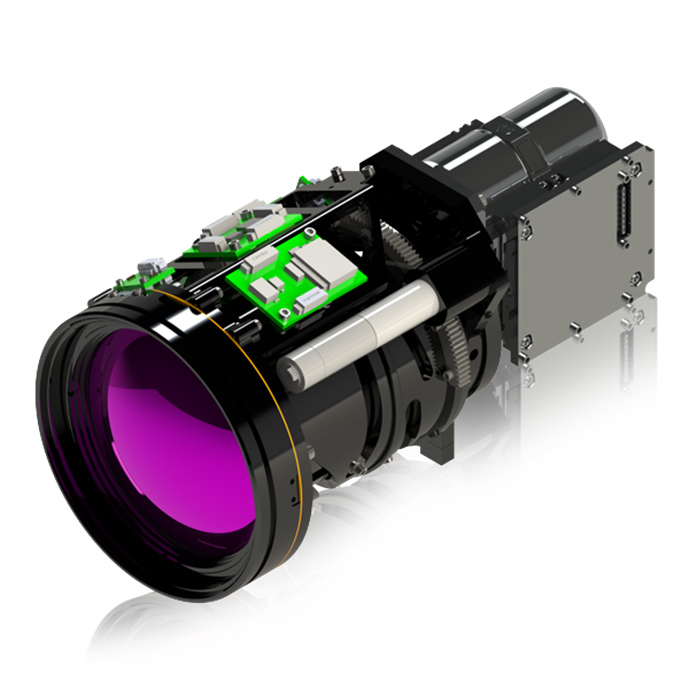
Figura 3. LWIR fixo de 73 mm (esquerda), CZ LWIR de 14-75 mm (central), CZ MWIR de 15-300 mm (direita)
Ao selecionar uma câmera termográfica LWIR não refrigerada, a maioria dos sistemas especifica um sensor de resolução de 640x512 com uma sensibilidade térmica menor ou igual a (≤) 20 millikelvins (mK) e óptica rápida especificada por um número f entre 0,9 e 1,4. Isso se traduz em uma abertura de lente (diâmetro) quase igual à distância focal, mas há um limite de tamanho prático para distâncias focais e faixas de zoom mais longas. Há também um ponto de cruzamento de custo de LWIR não refrigerado para MWIR refrigerado em distâncias focais superiores a aproximadamente 250 mm.
Os sistemas MWIR atuais incorporam resfriadores compactos de ciclo fechado com Tempo Médio até Falha (MTTF) de até 27.000 horas que operam com baixa potência. Como essa tecnologia de sensor é muito mais sensível do que a LWIR não refrigerada, ópticas tão lentas quanto 05,5 podem ser usadas, permitindo comprimentos focais de mais de 1.000 mm, mantendo o conjunto de lentes em tamanho e custo gerenciáveis. Os sensores MWIR refrigerados atuais têm pixels de 8 mícrons com resoluções de até 1280x1024 e sensibilidade de 30 mk.
Indicação de alvo móvel EO/IR em SNR baixo
Os sistemas EO/IR C-UAS empregam algoritmos de indicação de alvo móvel (MTI) como um primeiro estágio, usando técnicas que incluem diferenciação de quadros ou diferenciação temporal e subtração de fundo. Perto do limite de detecção, o ruído é indistinguível do movimento, e as flutuações de ruído no nível de pixel podem parecer pequenos objetos em movimento de quadro a quadro, especialmente sob alto ganho ou baixa luz. Movimentos de fundo, incluindo folhagem em movimento, nuvens, água, brilho térmico e sombras, geram “movimento falso”. O aumento dos limites de detecção mantém falsos positivos gerenciáveis, mas pode suprimir desproporcionalmente as detecções verdadeiras na borda da visibilidade.
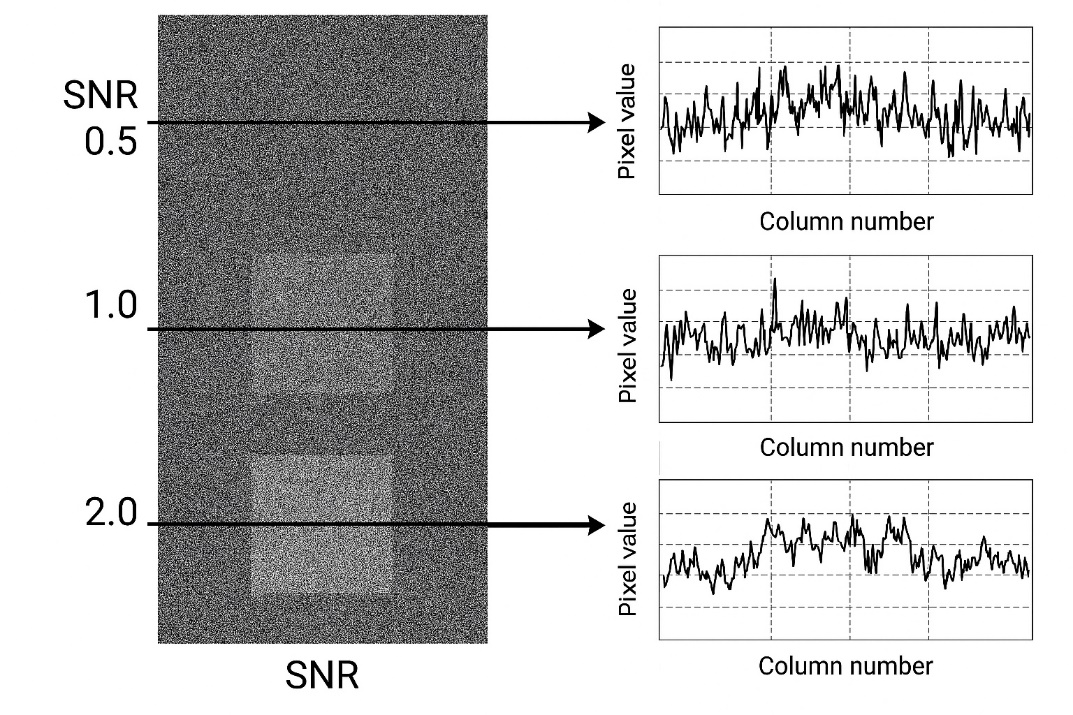
Figura 4. Exemplo de gráfico SNR
As detecções de MTI estão sujeitas a falsos positivos significativos. É uma boa prática acumular detecções MTI e quantificar detecções em uma hierarquia. O usuário pode então determinar a sensibilidade do sistema em relação a detecções precoces e falsos positivos aceitáveis. A câmera produz muitos “blobs” ou microrrastreios ruidosos que precisam ser confirmados. Em operação, o MTI no limite de detecção muitas vezes atua como um gerador candidato para um detector de objetos de IA e rastreador de alvos.
Detecção e rastreamento de alvos usando detectores de objetos EO/IR
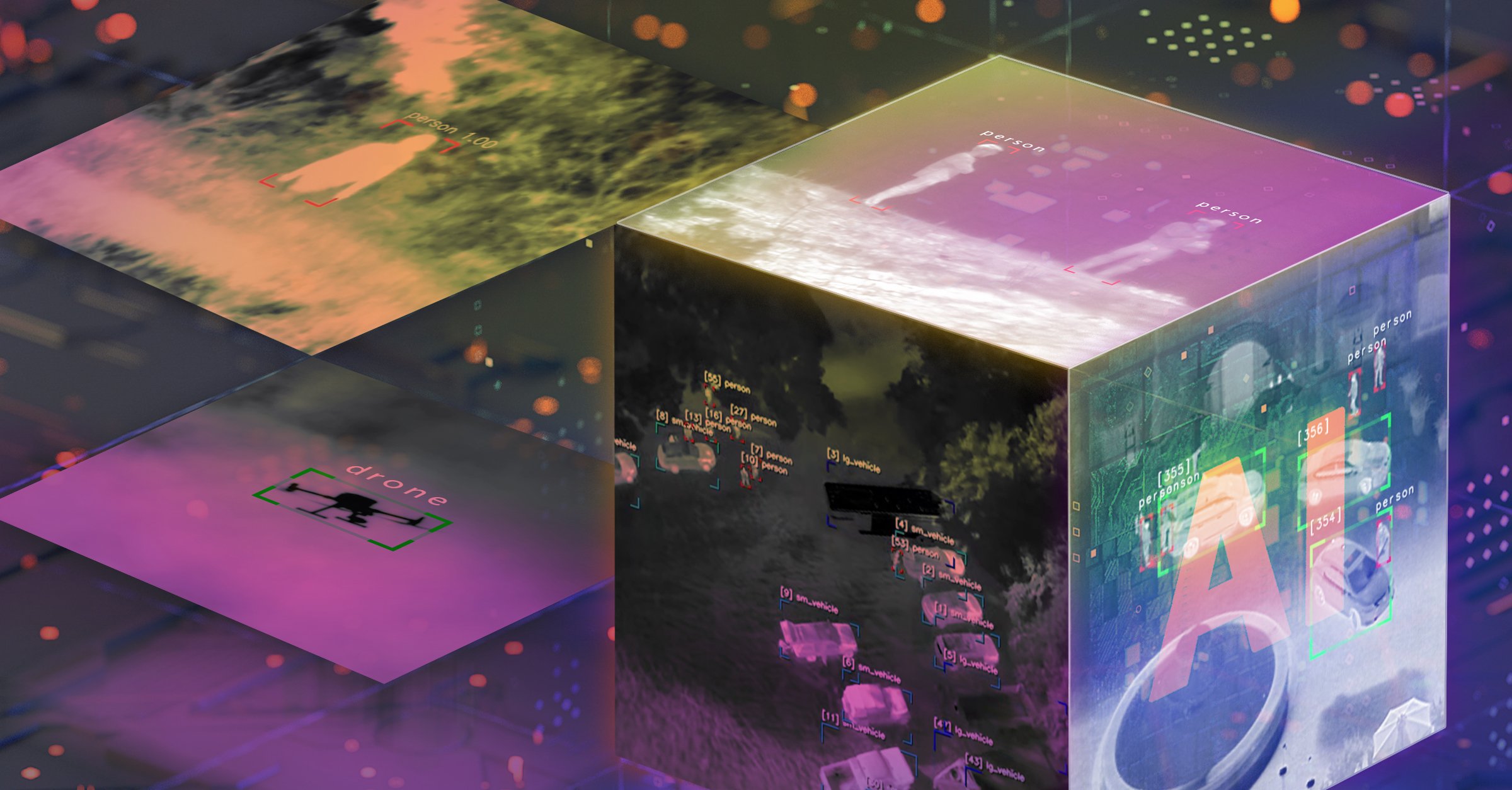
Detectores de objetos baseados em IA e aprendizagem profunda são amplamente usados para detecção de drones em sistemas de vídeo EO/IR e podem seguir a mesma ontologia que as classes de percepção humana de detecção, reconhecimento e identificação. Elas incorporam extração de recursos em várias escalas:
- Detecção (>10 x 10 pixels): Classificadores generalizados (drone vs. bird vs. plane) e localização (caixa delimitadora) para alvos pequenos a grandes com base em dados de treinamento limitados
- Reconhecimento (~20 x 10 pixels): Classificadores de grãos finos para classes-alvo, como quadcopter, drone de asa fixa e aeronave ISR aérea
- Identificação (~30 x 20 pixels): Classificadores de grãos finos baseados em extensos dados de treinamento de alta resolução de classes específicas de aplicações, como Shahed, marca e modelo de quadricópteros e alvos de loitering de asa fixa

Figura 5. Pipeline de Vídeo de Detecção de Drones
Limites de detecção para EO/IR
Para drones de longo alcance, o desempenho de EO/IR é frequentemente limitado por SNR e resolução, forçando o sistema a operar próximo ao limite de detecção. Para um pequeno quadcopter ou drone de asa fixa, o tamanho angular a longo alcance pode ser apenas alguns pixels ou até mesmo subpixel. Nesse ponto, o tamanho aparente do drone é comparável ou menor do que a função de propagação de ponto (PSF) da óptica. Os efeitos atmosféricos, incluindo dispersão, névoa e turbulência, podem reduzir ainda mais o contraste e introduzir desfoque aleatório. As condições de limite de detecção geralmente correspondem a:
- SNR: SNR baixo (1 a 3) no nível de pixel ou de pequenos pedaços
- Área: Área aparente muito pequena (<20 pixels>
- Fundo: Visibilidade intermitente à medida que o drone atravessa fundos complexos, por exemplo, árvores, edifícios, nuvens etc.
A maioria dos detectores de objetos se degrada gravemente quando o objeto está abaixo de aproximadamente 10×10 pixels. A 3×3 ou até 5×5 pixels, a rede tem muito pouco detalhe, as indicações de forma são limitadas, a textura é inexistente e apenas o movimento/contraste bruto permanece. Se o treinamento de rede não incluir alvos muito pequenos e ruidosos, o detector perderá alvos ou produzirá saídas instáveis. Detectores treinados usando imagens diurnas limpas, fundos específicos e alvos de contraste fortes podem ser especialmente desafiados ou falhar em condições de baixa luminosidade ou noturnas, névoa ou umidade e variações de fundo, por exemplo, deserto vs. urbano vs. marítimo.
No limite de detecção, qualquer incompatibilidade entre as distribuições de treinamento e implantação é ampliada. Práticas de rotulagem e anotação de dados de treinamento são muito importantes para alvos muito pequenos. A anotação manual pode ser propensa a erros. As caixas delimitadoras podem não estar alinhadas com o alvo real e podem não atingir os alvos totalmente na faixa extrema. Isso introduz um ruído de etiqueta que pode confundir o detector e limitar sua capacidade de aprender distinções finas em SNR baixo.
Além disso, os dados de treinamento raramente incluem exemplos de drones pequenos e fortemente borrados; a maioria das redes da CNN é inclinada para alvos nítidos ou moderadamente borrados. Desfoque e movimento da câmera são as principais restrições na detecção de drones de EO/IV, especialmente a longo alcance ou em plataformas móveis. Os pipelines de rastreamento por detecção dependem de detecções consistentes em posição e tamanho. O desfoque causa jitter e variabilidade de tamanho, quebrando a associação de dados. Rastreadores clássicos, por exemplo, recursos KLT ou correspondência de modelos, têm dificuldades quando a aparência interna do modelo muda drasticamente devido à direção e magnitude do desfoque.
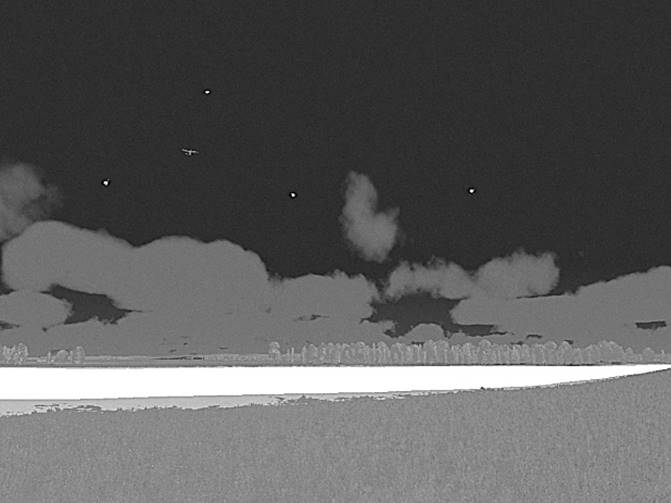

Figura 6. Simulação Sintética de EO/IV com Asa Fixa e Quadcopters à Distância
Para melhorar o desempenho, as equipes de desenvolvimento podem usar o aumento de dados, incluindo escala, injeção de ruído, desfoque e alterações de iluminação. O treinamento em dados sintéticos permite transformar modelos de drones em fundos realistas e exemplos negativos de aves, aviões e bagunça. Detectores multiquadros ou com reconhecimento de faixa podem ser empregados usando sequências em vez de quadros únicos.
Processamento de sinais de imagem EO/IR
ISP para sistemas de câmera de IV/EO refere-se ao conjunto de algoritmos e funções de hardware que convertem dados brutos do sensor em imagens utilizáveis e de alta qualidade que suportam detecção, reconhecimento, identificação, medição e tomada de decisão automatizada. Em sistemas de IV/EO, especialmente câmeras termográficas de IV, a saída bruta da matriz de plano focal (FPA) é ruidosa, não linear e não corrigida. O ISP transforma esses dados brutos em imagens estáveis, calibradas e visualmente otimizadas em tempo real. O desempenho e a confiabilidade da SNR e da rede dependem da qualidade do ISP para melhorar a detecção, o reconhecimento e a identificação de alvos (DRI). A Teledyne FLIR OEM desenvolveu algoritmos ISP de IV para melhorar a SNR e nos limites de detecção (~2x1,5 pixels) que aumentam o alcance para iniciar o rastreamento de drones em até 20%. Para saber mais, acesse www.oem.flir.com/prism-family.
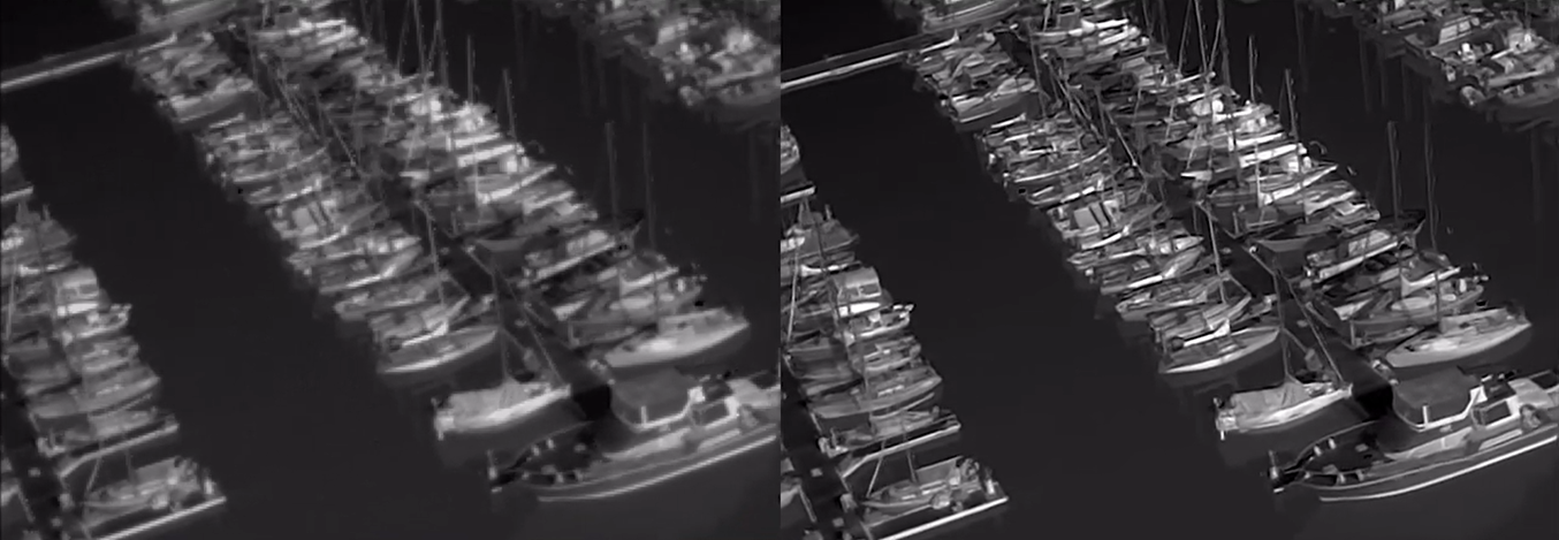
Figura 7. Exemplo de super-resolução de ISP OEM da Teledyne FLIR
Artigos Relacionados
-
 Nota de aplicação
Nota de aplicação
A Guide on Cost-Effective Thermal Lens Integration: What to Know for Defense and Autonomous Vehicle Applications
Saiba mais -
 Whitepaper
Whitepaper
AI Detection, Target Tracking, and Computational Imaging on Embedded Processors
Saiba mais -
 Artigo
Artigo
Simplify MWIR Development with Neutrino Featuring InVeo Electronics
Saiba mais