Consideraciones sobre el diseño de sensores de infrarrojos térmicos para la defensa contra UAS
Resumen ejecutivo
El uso de drones pequeños y de bajo coste se ha ampliado rápidamente en entornos militares y de seguridad pública, lo que crea una necesidad urgente de soluciones eficaces de sistema aéreo no tripulado (C-UAS). Este documento describe cómo los sensores EO/IR forman la columna vertebral de la cadena de corte C-UAS y compara los inconvenientes entre los sistemas de imágenes de bajo coste y las arquitecturas multisensor de alto rendimiento. Destaca los desafíos de la detección de largo alcance, donde los drones pueden aparecer como solo unos pocos píxeles, y el rendimiento está limitado por la relación señal/ruido (SNR). El documento también enfatiza las limitaciones de la detección clásica de objetos MTI y basada en IA en el borde de la visibilidad. Por último, destaca el papel esencial del procesamiento avanzado de señales de imagen (ISP) en la mejora de la SNR, la estabilización de objetivos de bajo contraste y la ampliación del rango de detección y seguimiento efectivos.
Introducción y antecedentes
La amenaza de dron está surgiendo en escenarios tácticos y de seguridad pública. La proliferación de drones pequeños, económicos y maniobrables es un gran desafío tanto para los planificadores militares como para la protección de vulnerabilidades públicas, comerciales e industriales. No es hiperbole afirmar que hay una carrera de armas entre drones ofensivos y soluciones C-UAS.
Las imágenes electroópticas (EO) y de infrarrojos térmicos (IR) se han convertido en tecnologías esenciales para detectar y rastrear drones. Para realizar un análisis de coste/beneficio, los desarrolladores deben comprender el espacio comercial de los sistemas C-UAS, incluidas las limitaciones del rango de detección, las capacidades del sistema de radar, el procesamiento de señales de imagen, los procesadores integrados y los modelos de inteligencia artificial (IA). Aunque cada sistema de defensa aérea se desarrolla contra un conjunto específico de amenazas aéreas, sus cadenas de muerte suelen estar formadas por tres subsistemas complejos: Sistemas de sensores, sistema de control de comandos y sistemas de derrota.
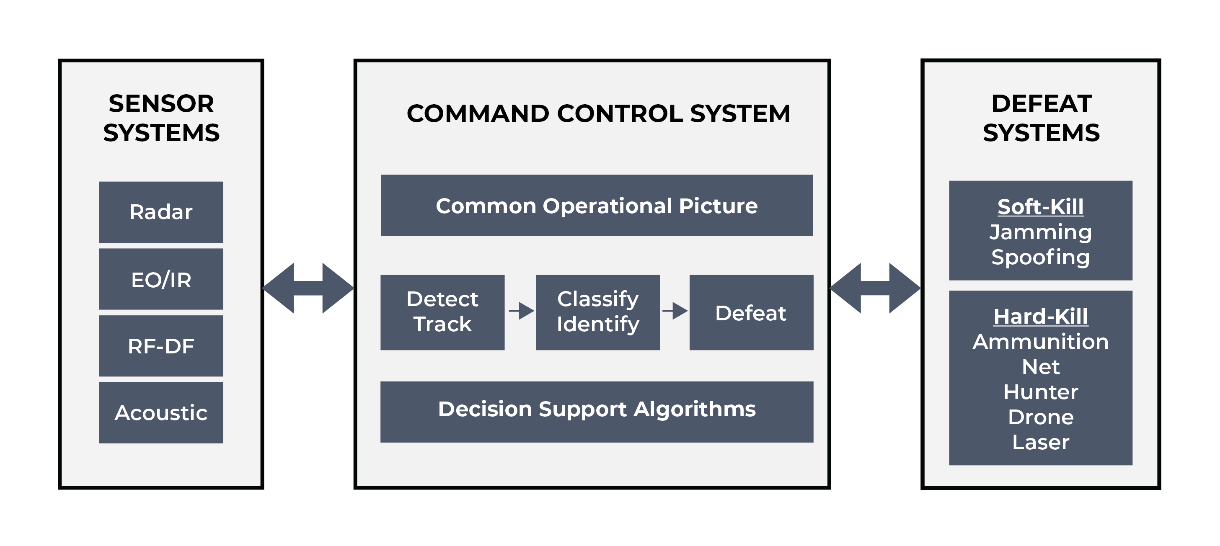
Figura 1. Proceso C-UAS para detectar, rastrear, identificar y neutralizar drones
La guerra ruso-ucraniana se ha convertido en un crisol para la innovación de UAS, acelerando las capacidades y tácticas de los drones. Aunque los sistemas de derrota como la interferencia de radio, la interferencia de señales GPS y los efectores cinéticos se implementan en las líneas de batalla, estos sistemas son costosos y tienen una implementación limitada en aplicaciones de seguridad pública.
Sistemas de imágenes EO/IR para la detección de drones
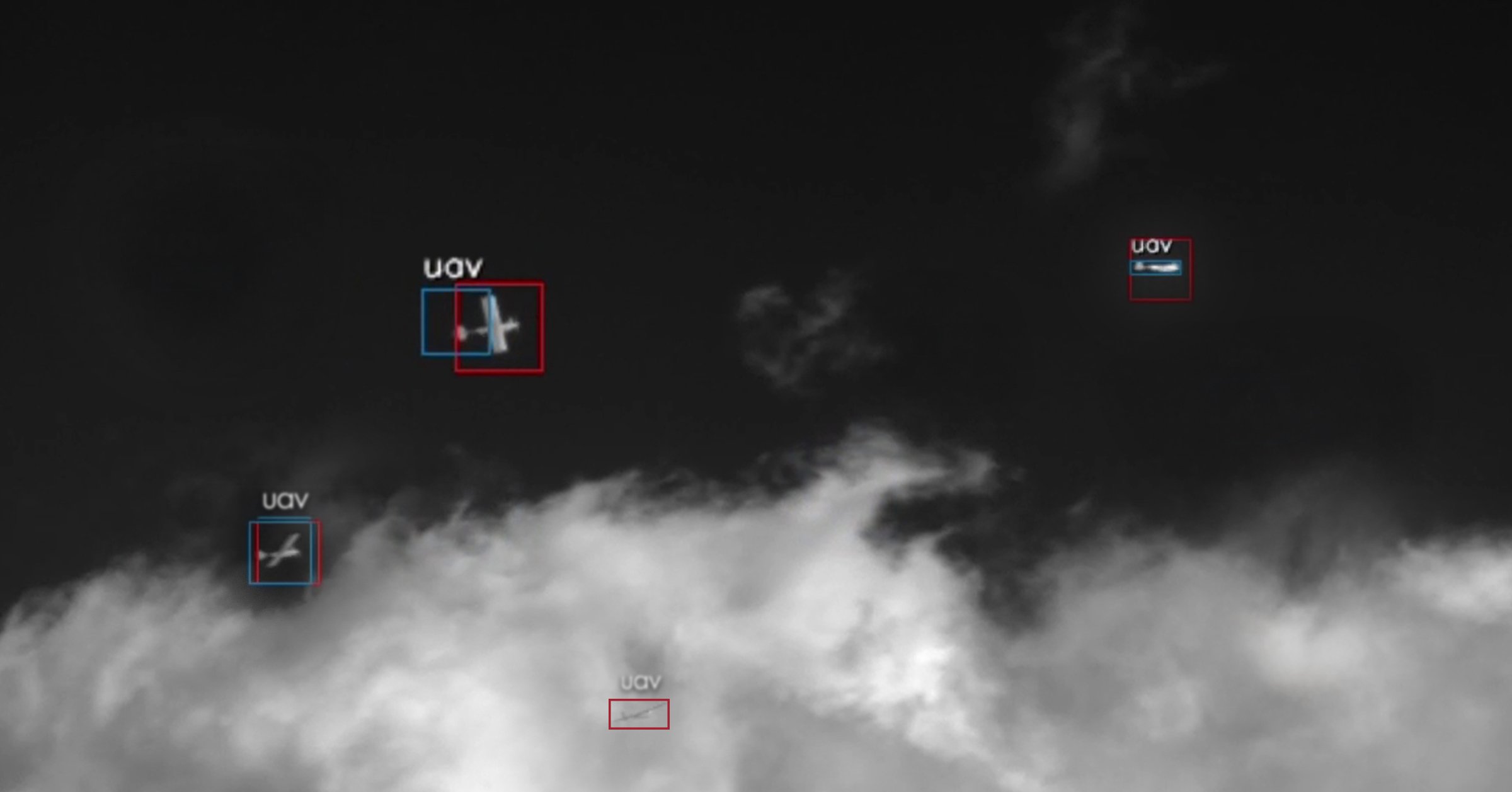
Los sensores electroópticos (EO) rentables ofrecen lentes de alta resolución y distancia focal adecuada. Los sensores de infrarrojos (IR) pasivos son sensibles a las emisiones térmicas de fotones en lugar de a la luz visible, lo que hace que IR sea ideal para operaciones ininterrumpidas. Las cámaras EO tienen una resolución angular más alta, que se traduce directamente en píxeles en el objetivo: este es un parámetro crítico del sistema para la detección temprana de drones. Sin embargo, la SNR de los píxeles EO en un dron pequeño suele ser baja debido al contraste limitado contra un fondo del cielo. Las cámaras de IR a menudo pueden detectar el movimiento de drones representado por tan solo un clúster de 2 x 2 píxeles, dado el fondo frío del cielo. Además, las señales de clasificación, incluidas la forma, los patrones de movimiento y las firmas térmicas, ayudan a IR a distinguir drones de aves, aeronaves y desorden para minimizar falsos positivos, lo que a menudo reduce la efectividad de los sistemas de imágenes.
Consideraciones sobre el diseño de soluciones C-UAS
Los sistemas de detección C-UAS se dividen en dos categorías separadas de coste y rendimiento: menor coste y alto rendimiento. Los sistemas de detección de bajo coste, solo con imágenes y <1000 metros de distancia de deteccin de drones integran sensores no refrigerados eo e ir de onda larga lwir con lentes de distancia focal fija y cuestan entre 50 000 y 150 000 usd. estos sistemas suelen limitarse a un campo de visin fijo fov o a escanear de 90 a 180 grados horizontalmente lo que es til para la supervisin perimetral. los sistemas avanzados de deteccin multisensor de alto rendimiento con un alcance>1000 metros incorporan cámaras EO y de IR de onda media (MWIR) refrigeradas con óptica y radar de zoom continuo (CZ). Estos sistemas cuestan entre 150 000 y 1 millón de USD y se pueden configurar para proporcionar un campo de visión completo de 360 grados para una conciencia situacional máxima.
Las soluciones C-UAS de bajo coste suelen incluir lo siguiente:
- Cámaras de infrarrojos EO y LWIR no refrigeradas con óptica de zoom o de distancia focal larga
- Montaje fijo o panorámico e inclinación
- Ordenador integrado para detección y seguimiento de objetos
- Sistema de anulación, normalmente atasco de RF
Las soluciones C-UAS de alto rendimiento suelen incluir lo siguiente:
- Cámaras MWIR refrigeradas y EO con óptica CZ de largo alcance
- Panorámica e inclinación o cardán estabilizado en plataformas estacionarias o móviles con mástiles extensibles
- Unidades de radar de área amplia y alta resolución utilizadas para el giro de la cámara a la señal
- Sensores acústicos
- Basado en servidor o PC
- Sistemas de derrota: todo tipo, incluida la cinética
 Figura 2. C-UAS de bajo coste
Figura 2. C-UAS de bajo coste
Al seleccionar una cámara EO, hay muchas especificaciones a tener en cuenta: color frente a monocromo, resoluciones de hasta 200MP y obturador rodante frente a global. Hay intercambios a nivel de sistema para la velocidad de píxeles, el procesamiento de señales integrado en el borde, la velocidad de bits, la sensibilidad y la selección de lentes. Los sistemas EO proporcionan de 2 a 8 veces más resolución y píxeles en el objetivo que una cámara IR, pero el rendimiento del rango de detección es una función de SNR.


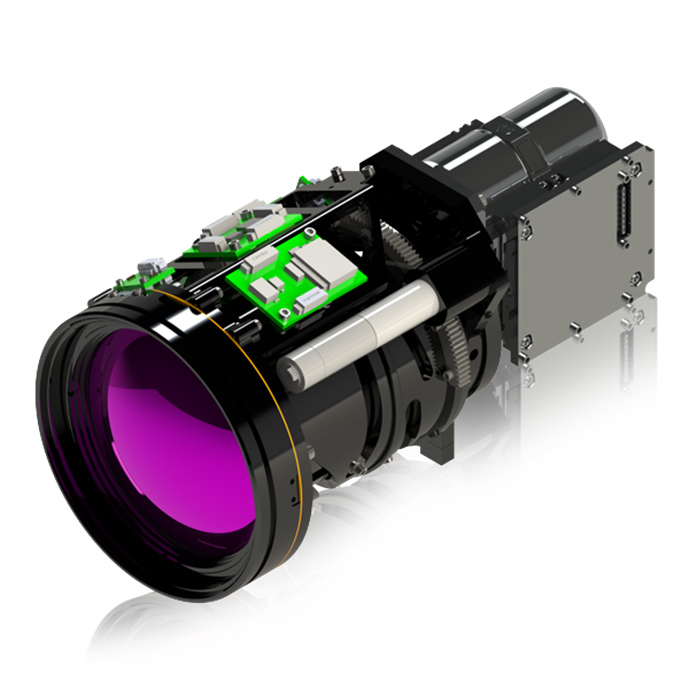
Figura 3. LWIR fijo de 73 mm (izquierda), LWIR CZ de 14-75 mm (centro), MWIR CZ de 15-300 mm (derecha)
Al seleccionar una cámara térmica LWIR sin refrigerar, la mayoría de los sistemas especifican un sensor de resolución de 640 x 512 con una sensibilidad térmica inferior o igual a (≤)20 millikelvins (mK) y óptica rápida especificada por un número f entre 0,9 y 1,4. Esto se traduce en una apertura del objetivo (diámetro) casi igual a la distancia focal, pero hay un límite de tamaño práctico para distancias focales y rangos de zoom más largos. También hay un punto de cruce de coste de LWIR no refrigerado a MWIR refrigerado a distancias focales superiores a aproximadamente 250 mm.
Los sistemas MWIR actuales incorporan refrigeradores compactos de ciclo cerrado con tiempo medio de fallo (MTTF) de hasta 27 000 horas que funcionan a baja potencia. Debido a que esta tecnología de sensor es mucho más sensible que LWIR no refrigerado, se puede utilizar una óptica tan lenta como ™5,5, lo que permite distancias focales de más de 1000 mm mientras mantiene el conjunto de lente a un tamaño y coste manejables. Los sensores MWIR refrigerados actuales tienen píxeles de 8 micras con resoluciones de hasta 1280 x 1024 y sensibilidad de 30 mk.
Indicación de objetivo móvil EO/IR a SNR baja
Los sistemas C-UAS de EO/IR utilizan algoritmos de indicación de objetivo móvil (MTI) como primera etapa, utilizando técnicas que incluyen la diferenciación de fotogramas o temporal y la sustracción de fondo. Cerca del límite de detección, el ruido es indistinguible del movimiento y las fluctuaciones de ruido a nivel de píxel pueden parecer pequeños objetos en movimiento de fotograma a fotograma, especialmente bajo alta ganancia o baja luz. Los movimientos de fondo, incluidos el follaje en movimiento, las nubes, el agua, el calor, el brillo y las sombras, generan “falso movimiento”. El aumento de los umbrales de detección mantiene manejables los falsos positivos, pero puede suprimir de forma desproporcionada las detecciones reales en el borde de la visibilidad.
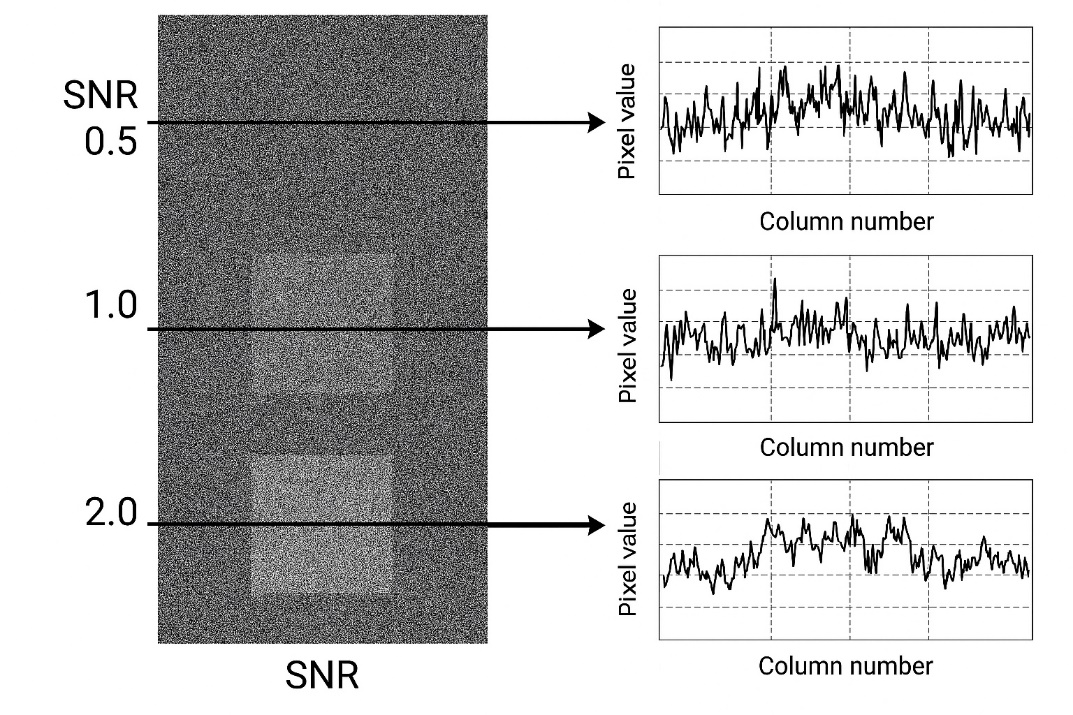
Figura 4. Ejemplo de gráfico SNR
Las detecciones de MTI están sujetas a falsos positivos significativos. Es una buena práctica acumular detecciones de MTI y cuantificar las detecciones en una jerarquía. A continuación, el usuario puede determinar la sensibilidad del sistema en relación con las detecciones tempranas y los falsos positivos aceptables. La cámara produce muchos “blobs” o micropistas ruidosos que deben confirmarse. En funcionamiento, MTI en el límite de detección a menudo actúa como generador candidato para un detector de objetos de IA y un rastreador de objetivos.
Detección y seguimiento de objetivos con detectores de objetos EO/IR
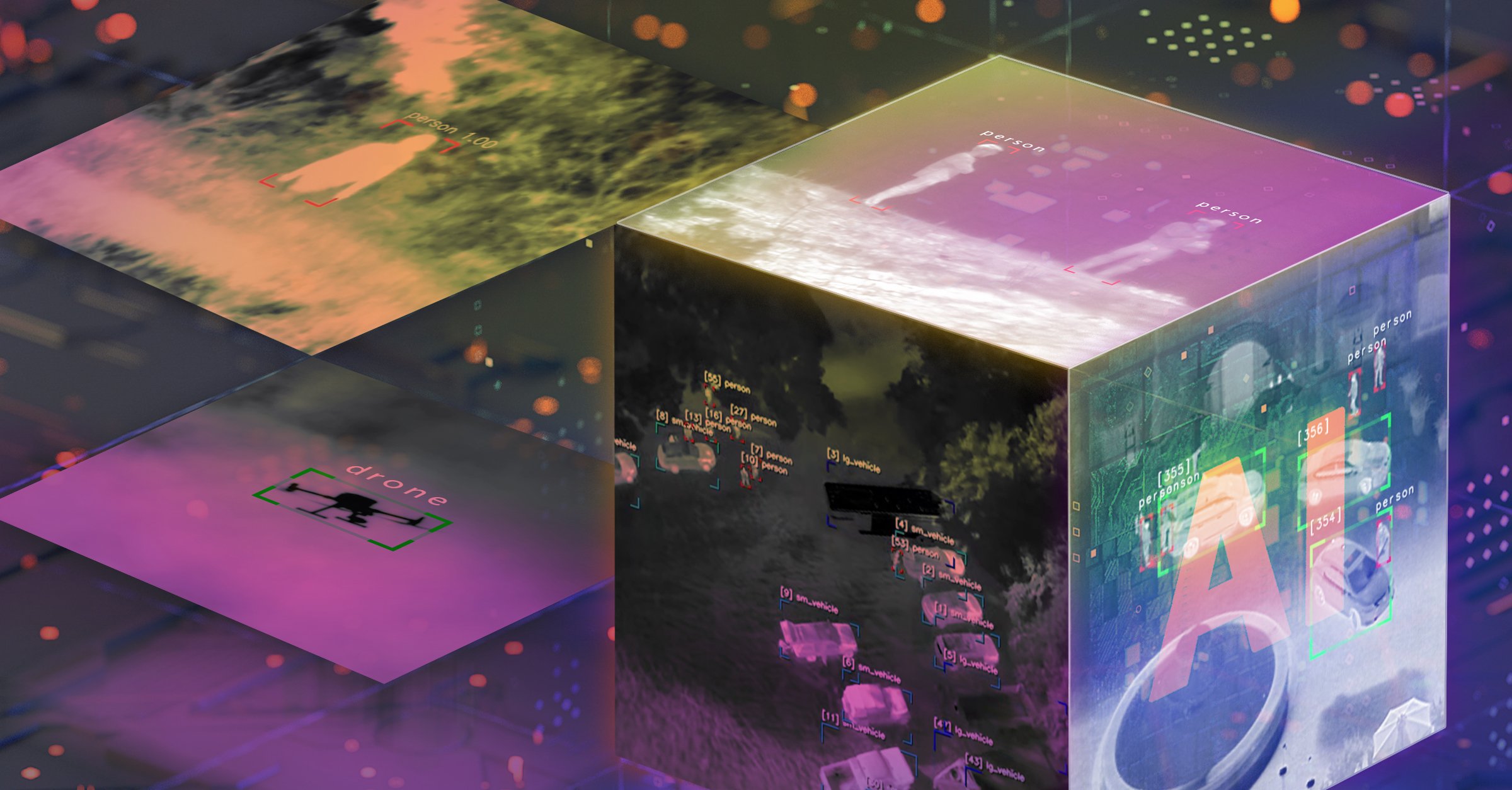
Los detectores de objetos de aprendizaje profundo basados en IA se utilizan ampliamente para la detección de drones en sistemas de vídeo EO/IR y pueden seguir la misma ontología que las clases de percepción humana de detección, reconocimiento e identificación. Incorporan extracción de funciones multiescala:
- Detección (>10 x 10 píxeles): Clasificadores generalizados (drona frente a pájaro frente a avión) y localización (cuadro delimitador) para objetivos pequeños a grandes basados en datos de formación limitados
- Reconocimiento (~20 x 10 píxeles): Clasificadores de grano fino para clases de objetivos como cuadricóptero, dron de ala fija y aeronaves ISR aéreas
- Identificación (~30 x 20 píxeles): Clasificadores detallados basados en amplios datos de formación de alta resolución de clases específicas de la aplicación como Shahed, marca y modelo de cuadricóptero y objetivos de merodeo de alas fijas

Figura 5. Tubería de vídeo de detección de drones
Límites de detección para EO/IR
Para drones de largo alcance, el rendimiento de EO/IR suele estar limitado por SNR y resolución, lo que obliga al sistema a funcionar cerca del límite de detección. Para un cuadricóptero pequeño o un dron de ala fija, el tamaño angular a largo alcance puede ser solo unos pocos píxeles o incluso un subpíxel. En ese momento, el tamaño aparente del dron es comparable o menor que la función de extensión de punto (PSF) de la óptica. Los efectos atmosféricos, incluida la dispersión, la bruma y las turbulencias, pueden reducir aún más el contraste e introducir un desenfoque aleatorio. Las condiciones de límite de detección suelen corresponder a:
- SNR: SNR baja (1–3) en el nivel de píxel o de pequeño parche
- Área: Área aparente muy pequeña (<20 pxeles>
- Fondo: Visibilidad intermitente a medida que el dron cruza fondos complejos, p. ej., árboles, edificios, nubes, etc.
La mayoría de los detectores de objetos se degradan gravemente cuando el objeto está por debajo de aproximadamente 10 × 10 píxeles. Con 3 × 3 o hasta 5 × 5 píxeles, la red tiene muy poco detalle, las señales de forma son limitadas, la textura no existe y solo queda movimiento/contraste bruto. Si la formación en red no incluye objetivos muy pequeños y ruidosos, el detector no detectará objetivos o producirá salidas inestables. Los detectores entrenados utilizando imágenes diurnas limpias, fondos específicos y objetivos de contraste fuerte pueden verse especialmente desafiados o fallar en condiciones de poca luz o nocturnas, bruma o humedad, y variaciones de fondo, por ejemplo, desierto frente a urbano frente a marítimo.
En el límite de detección, se aumenta cualquier discrepancia entre las distribuciones de formación e implementación. Las prácticas de etiquetado y anotación de datos de formación son muy importantes para objetivos muy pequeños. La anotación manual puede ser propensa a errores. Los cuadros delimitadores pueden no alinearse con el objetivo real y pueden pasar por alto objetivos completamente en el rango extremo. Esto introduce ruido de etiqueta que puede confundir el detector y limitar su capacidad de aprender distinciones finas a baja SNR.
Además, los datos de formación rara vez incluyen ejemplos de drones pequeños y muy borrosos; la mayoría de las redes CNN están sesgadas hacia objetivos afilados o moderadamente borrosos. El desenfoque y el movimiento de la cámara son limitaciones importantes en la detección de drones EO/IR, especialmente a largo alcance o en plataformas en movimiento. Las tuberías de seguimiento por detección dependen de detecciones que son coherentes en posición y tamaño. El desenfoque provoca fluctuación y variabilidad de tamaño, lo que rompe la asociación de datos. Los rastreadores clásicos, p. ej., las características KLT o la coincidencia de plantillas, tienen dificultades cuando la apariencia interna de la plantilla cambia drásticamente debido a la dirección y magnitud borrosas.
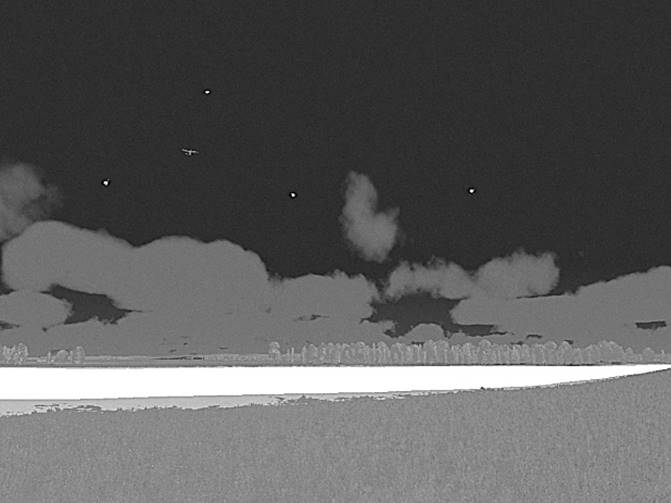

Figura 6. Simulación sintética EO/IR con ala fija y cuadricópteros a alcance
Para mejorar el rendimiento, los equipos de desarrollo pueden utilizar el aumento de datos, incluidos el escalado, la inyección de ruido, el desenfoque y los cambios de iluminación. La formación en datos sintéticos permite convertir los modelos de drones en fondos realistas y ejemplos negativos de aves, aviones y desorden. Los detectores multifotograma o con reconocimiento de seguimiento se pueden emplear utilizando secuencias en lugar de fotogramas individuales.
Procesamiento de señales de imagen EO/IR
ISP para sistemas de cámaras EO/IR se refiere al conjunto de algoritmos y funciones de hardware que convierten datos de sensores sin procesar en imágenes utilizables y de alta calidad que admiten la detección, el reconocimiento, la identificación, la medición y la toma de decisiones automatizada. En los sistemas EO/IR, especialmente las cámaras IR térmicas, la salida bruta de la matriz de plano focal (FPA) es ruidosa, no lineal y no corregida. ISP transforma estos datos sin procesar en imágenes estables, calibradas y visualmente optimizadas en tiempo real. La SNR y el rendimiento y la fiabilidad de la red dependen de la calidad del ISP para mejorar la detección, el reconocimiento y la identificación (DRI) de objetivos. El OEM de Teledyne FLIR ha desarrollado algoritmos IR ISP para mejorar la SNR y en los límites de detección (~2 x 1,5 píxeles) que aumentan el alcance para iniciar el seguimiento de drones hasta en un 20 %. Para obtener más información, visite www.oem.flir.com/prism-family.
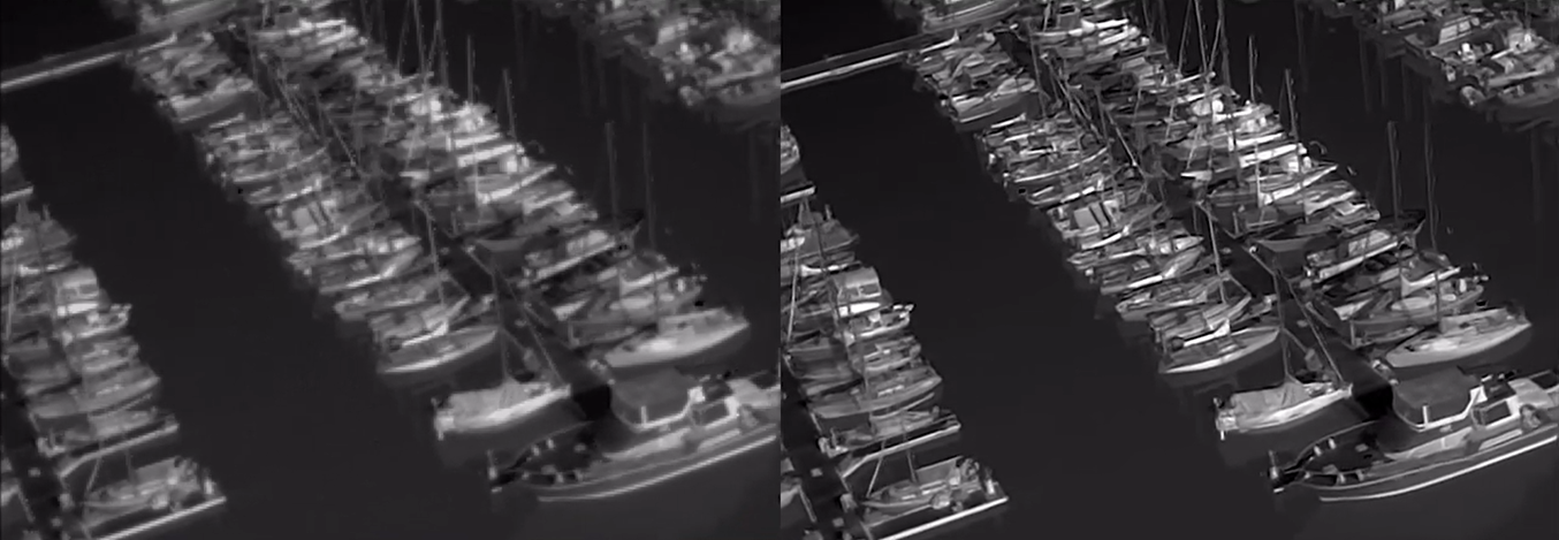
Figura 7. Ejemplo de superresolución ISP OEM de Teledyne FLIR
Artículos relacionados
-
 Nota de la aplicación
Nota de la aplicación
A Guide on Cost-Effective Thermal Lens Integration: What to Know for Defense and Autonomous Vehicle Applications
Más información -
 Documento técnico
Documento técnico
AI Detection, Target Tracking, and Computational Imaging on Embedded Processors
Más información -
 Artículo
Artículo
Simplify MWIR Development with Neutrino Featuring InVeo Electronics
Más información