Reducing Phantom Braking in ADAS with Thermal-Fused AI

Executive Summary
As Automatic Emergency Braking (AEB) and Pedestrian Automatic Emergency Braking (PAEB) systems evolve to meet the higher performance expectations of FMVSS No. 127, developers face a more demanding engineering challenge: improving detection of real hazards while minimizing unnecessary interventions. This paper explains how phantom braking can arise from perception errors in conventional visible-camera-and-radar systems, particularly in low-light and visually complex conditions. It argues that thermal-fused PAEB offers a practical multimodal approach to help OEMs and tier-one suppliers improve nighttime pedestrian detection, reduce false brake activations, and better align with emerging safety and validation requirements.
Phantom Braking Remains a Critical ADAS Challenge
Advanced Driver Assistance Systems (ADAS) have matured rapidly, but real-world edge cases still expose important perception limitations. This is especially evident in AEB and PAEB, where strong baseline performance can still degrade under challenging environmental and lighting conditions.
Although AEB and PAEB have delivered meaningful safety benefits, unnecessary braking events, commonly described as phantom braking, remain a significant systems-engineering challenge. These events expose perception gaps that can undermine driver trust and complicate the path to higher confidence in automated safety functions.
Phantom Braking as Perception Failure
Phantom braking occurs when an AEB system commands deceleration in the absence of a legitimate collision threat. In practice, these false activations can occur abruptly and at highway speeds, creating a hazardous mismatch between vehicle behavior and surrounding traffic. From an engineering standpoint, the issue is best understood as a false positive in the perception and decision pipeline.
According to the National Highway Traffic Safety Administration (NHTSA), unexpected brake activations have generated thousands of complaints across multiple vehicle makes and models. The issue is rooted in how conventional sensing modalities interpret complex scenes. Visible-light cameras and radar are effective core technologies, but they can still misclassify shadows, overpasses, glare, road-surface artifacts, precipitation, and other environmental inputs as imminent hazards. In addition, American Automobile Association (AAA) testing has shown that visible-camera-based pedestrian detection remains particularly sensitive to low-visibility and complex nighttime scenes.
Why False Positives Create Real Safety Risk
The safety implications poised by false positives are substantial. A sudden, unnecessary deceleration event can increase the risk of rear-end collisions, destabilize driver response, and introduce new risk into otherwise normal traffic flow. In other words, an AEB system that responds incorrectly to a non-threat can become a hazard source itself, particularly at higher vehicle speeds where response times are compressed.
At the system level, repeated false positives create a confidence problem for both drivers and developers. Each unnecessary braking event erodes user trust, complicates validation, and raises the performance threshold for broader adoption of increasingly automated vehicle functions.
Why Conventional Sensor Stacks Still Miss Edge Cases
ADAS perception stacks built primarily around visible-light cameras and radar have well-known constraints. Visible cameras depend on reflected light and are therefore limited by headlamp range, low ambient illumination, glare, fog, and heavy precipitation. Radar provides robust range and velocity information, but on its own may lack the spatial resolution or object-classification fidelity needed to disambiguate complex roadway scenes.
Separate from phantom braking, production PAEB performance in low-light conditions remains a key challenge. NHTSA testing indicated that four of five production vehicles did not pass nighttime PAEB evaluations, and later, VSI Labs testing found that three 2024 vehicles failed two or more nighttime scenarios aligned with Federal Motor Vehicle Safety Standard (FMVSS) No. 127. These findings are especially consequential because 76 percent of pedestrian fatalities occur at night.

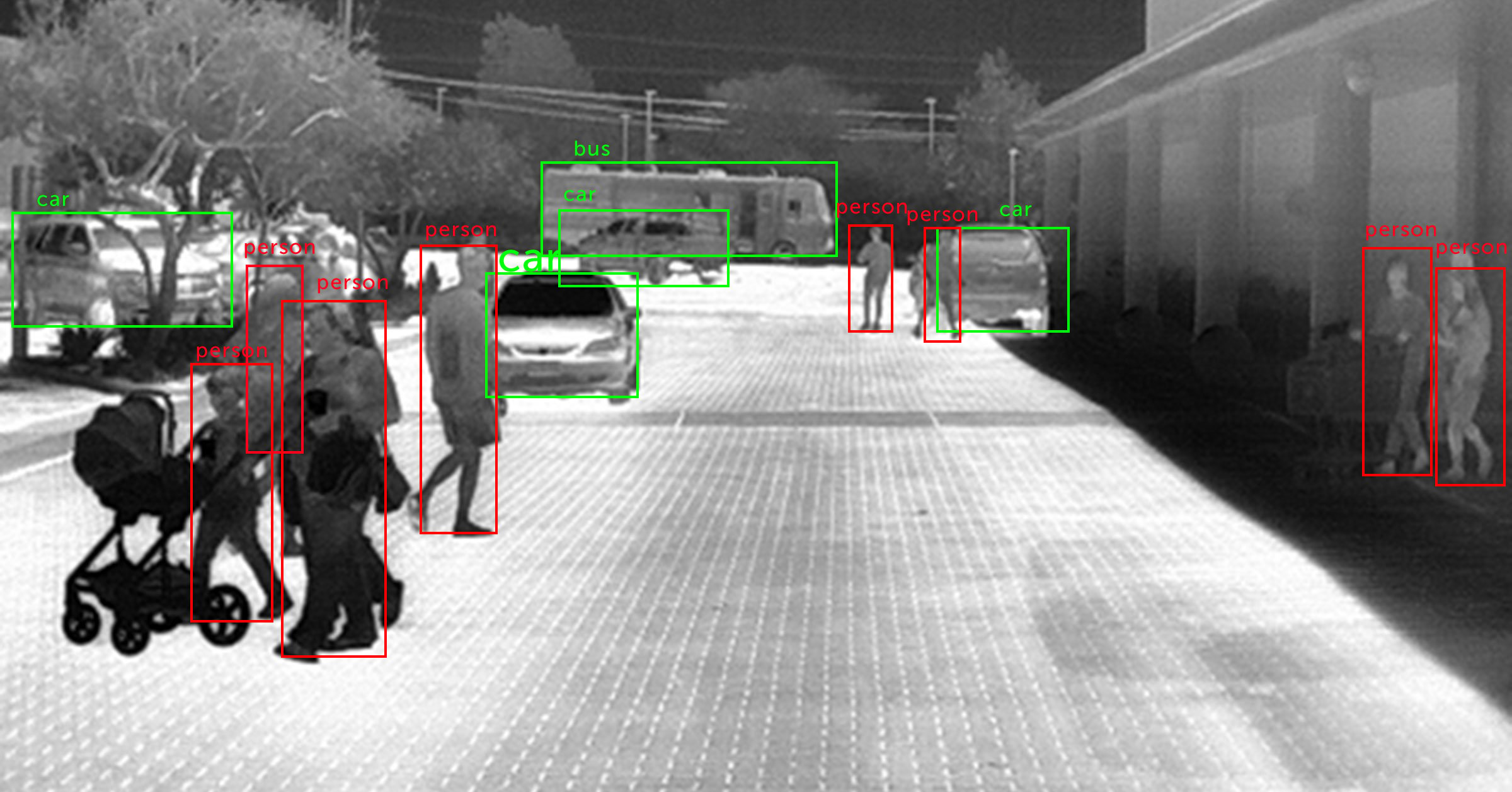
Figure 1. Side-by-side visible camera and thermal camera video frame captures from VSI research vehicle during low-beam at approximately 45, 35, 25, and 15 meters
What Thermal Sensing Adds to the Perception Stack
Thermal-fused AI adds an orthogonal sensing modality that helps close these perception gaps. Unlike visible cameras that depend on reflected light, longwave infrared (LWIR) thermal cameras detect emitted infrared energy in the 8-14 micron band. This enables passive imaging without active illumination and gives the perception stack access to scene information that is largely independent of visible-light conditions.
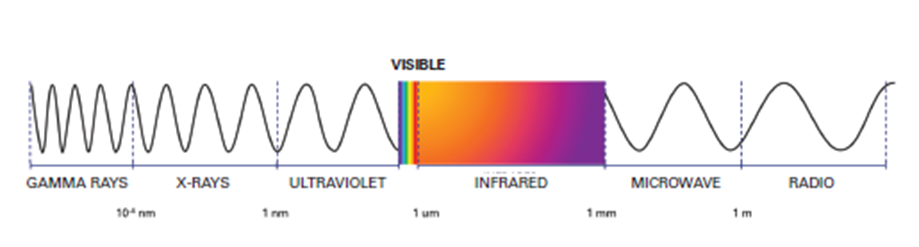
Figure 2. Automotive thermal IR cameras see infrared energy (heat) at 8 to 14 microns
Because pedestrians, animals, and many roadway objects emit or present distinct thermal signatures, a thermal camera can produce high-contrast imagery in conditions that challenge visible sensors. These include darkness, smoke, fog, dust, shadow transitions, and sun glare and headlight. The ability to resolve small thermal differentials supports earlier detection and more reliable classification in cluttered urban scenes and on unlit roads, improving nighttime pedestrian safety while helping reduce unnecessary braking events.
Sensor Fusion as the Path to Lower False Activations
Reducing phantom braking requires more than a better individual sensor; it requires a more robust fusion architecture. By combining thermal, visible, and radar data within AI-based perception models, developers can improve redundancy, strengthen object confirmation, and increase confidence scoring before the braking stack commits to intervention.
For example, if glare degrades the visible channel, the thermal sensor can still provide a stable heat signature to corroborate radar returns and support classification. This multimodal confirmation strategy helps suppress phantom objects by reducing the likelihood that a single ambiguous input will propagate through the full decision chain and trigger unnecessary braking.
Engineering for FMVSS No. 127 Performance Requirements
As systems are tuned to detect more potential hazards, the risk of false activation may increase unless the perception stack is sufficiently robust. FMVSS No. 127 raises the performance bar for AEB by requiring stronger pedestrian capability, including operation in both daylight and darkness. For engineering teams, that means achieving a balance that improves true-positive detection across a wider range of scenarios while minimizing unnecessary braking interventions.
FMVSS No. 127 assesses that balance directly by including standardized false-activation scenarios designed to verify that AEB does not brake for non-threatening objects or roadway features. In the steel trench plate test, the vehicle approaches a flat steel road plate in its lane at 80 km/h. In the vehicle pass-through test, the vehicle travels at the same speed through a gap between two stationary vehicles in adjacent lanes. These scenarios evaluate whether the system can distinguish benign scene elements from actual collision threats.
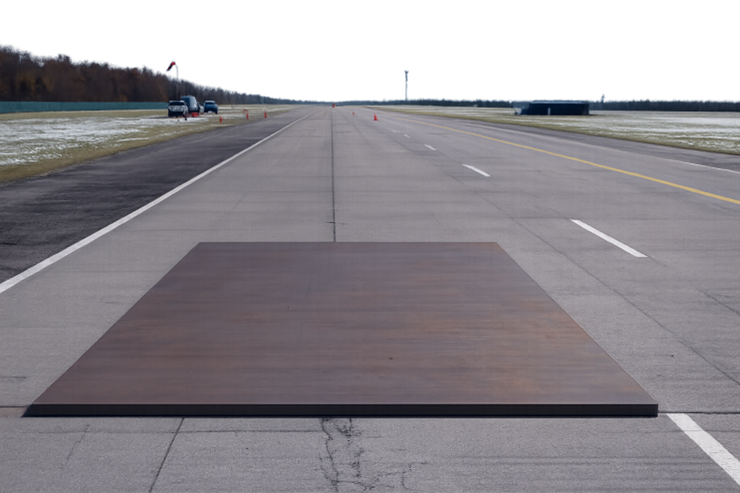
Figure 3. Representative steel trench plate test setup
In practical terms, the vehicle must move through these scenarios without unwarranted AEB intervention. This requirement formalizes a key engineering reality: a system designed to detect more hazards must also avoid overreacting to harmless inputs. Without sufficient perception confidence, efforts to improve PAEB performance can unintentionally increase false activations and phantom braking.
FMVSS No. 127 ensures that AEB activates when a real threat is present. It also requires the system to refrain from braking when no threat exists. The standard therefore pushes developers to improve detection performance and false-positive suppression at the same time.
Thermal Imaging Is Moving into the Mainstream ADAS Stack
Thermal-fused PAEB offers a practical path forward. By combining thermal imaging with visible cameras, radar, and AI-based perception, developers can improve nighttime pedestrian detection while adding another layer of confirmation before the braking system intervenes. This multimodal approach can help OEMs and tier-one suppliers address both sides of the FMVSS No. 127 challenge: stronger PAEB performance and reduced risk of false-activation risk. For automotive deployment, thermal sensors must also meet production requirements such as shutterless operation to avoid image interruptions and heated packaging to maintain performance in cold and wet conditions.
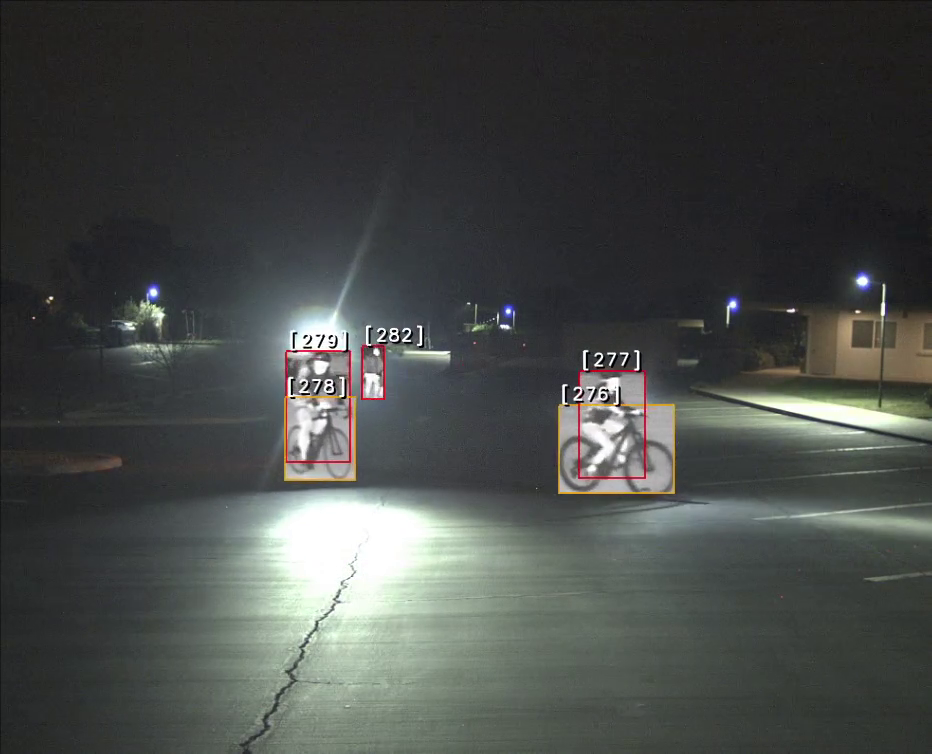
Figure 4. Fused thermal and visible imagery
Thermal imaging was once a simple visual driver’s aid associated mainly with premium vehicle platforms as, but manufacturing scale, sensor improvements, and the launch of Tura, the first Automotive Safety Integrity Level (ASIL) B LWIR thermal camera developed in compliance with ISO 26262 functional safety (FuSa) standards, have changed the equation. As OEMs and tier-one suppliers evaluate tradeoffs between sensor cost, validation burden, regulatory exposure, and brand risk, thermal cameras are becoming increasingly viable for broader deployment.

Figure 5. Representative automotive thermal camera
Beyond compliance targets, thermal fusion can improve performance in ADAS corner cases such as pedestrians in dark clothing, wildlife on unlit roads, and rapid transitions between bright and dark scenes such as tunnels. Longer-range, higher-confidence detection also gives the braking controller more time to execute smoother deceleration profiles, improving safety performance and ride quality.
Thermal imaging is increasingly positioned as a practical sensing modality for next-generation automotive perception rather than as a specialty enhancement. As the industry advances toward the zero-fatality objective often described as Vision Zero, AEB and PAEB systems must improve both true-positive detection and false-activation suppression.
Integrating thermal-fused AI into the perception stack can help vehicles distinguish legitimate hazards from benign scene artifacts, reducing phantom braking while improving performance in degraded-visibility conditions.