Considérations relatives à la conception des capteurs infrarouges thermiques pour la défense contre les drones
Résumé exécutif
L’utilisation de petits drones à faible coût s’est rapidement étendue aux environnements militaires et de sécurité publique, créant un besoin urgent de solutions efficaces de système aérien sans pilote (C-UAS). Cet article décrit comment les capteurs EO/IR forment la base de la chaîne de destruction C-UAS, et compare les compromis entre les systèmes d’imagerie à moindre coût et les architectures multicapteurs hautes performances. Elle met en évidence les défis de la détection à longue portée, où les drones peuvent apparaître comme seulement quelques pixels, et les performances sont limitées par le rapport signal/bruit (SNR). L’article souligne également les limites de la détection classique des objets MTI et basée sur l’IA à la périphérie de la visibilité. Enfin, elle souligne le rôle essentiel du traitement avancé du signal d’image (ISP) dans l’amélioration du SNR, la stabilisation des cibles à faible contraste et l’extension de la portée de détection et de suivi efficaces.
Introduction et contexte
La menace des drones émerge dans les scénarios tactiques et de sécurité publique. La prolifération de drones de petite taille, peu coûteux et manœuvrables est un grand défi pour les planificateurs militaires et pour la protection des vulnérabilités publiques, commerciales et industrielles. Il n’est pas hyperbole d’affirmer qu’il existe une course à l’armement entre les drones offensants et les solutions C-UAS.
L'imagerie électro-optique (EO) et infrarouge thermique (IR) est devenue une technologie essentielle pour détecter et suivre les drones. Pour effectuer une analyse coût/bénéfice, les développeurs doivent comprendre l’espace commercial des systèmes C-UAS, y compris les limitations de portée de détection, les capacités du système radar, le traitement du signal d’image, les processeurs intégrés et les modèles d’intelligence artificielle (IA). Bien que chaque système de défense aérienne soit développé contre un ensemble spécifique de menaces aériennes, leurs chaînes de destruction se composent généralement de trois sous-systèmes complexes : Systèmes de capteurs, système de commande et systèmes de défaite.
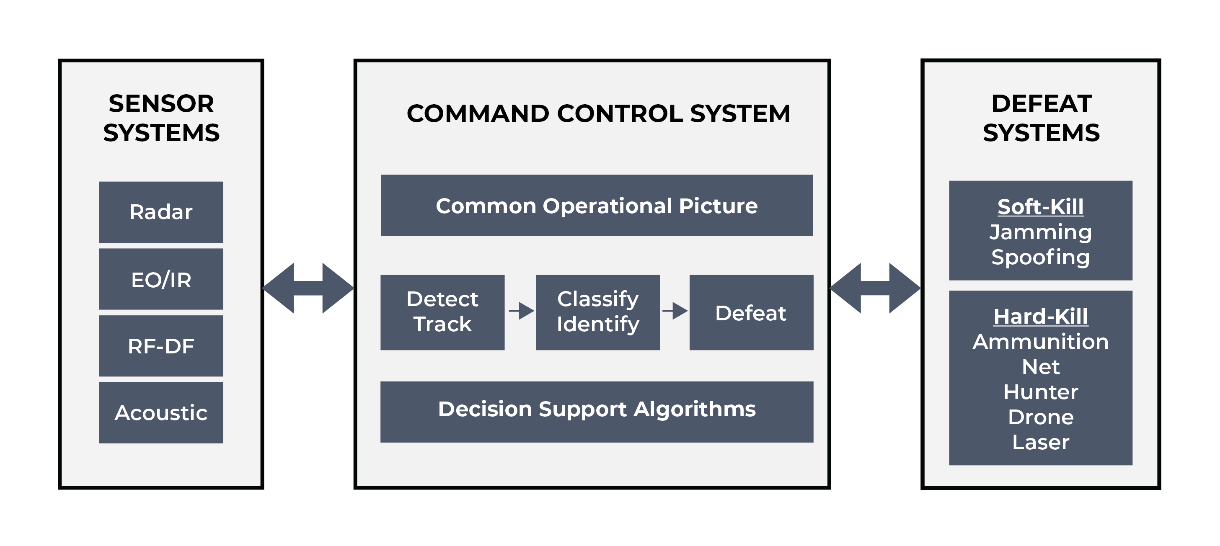
Figure 1. Processus C-UAS pour détecter, suivre, identifier et neutraliser les drones
La guerre entre la Russie et l’Ukraine est devenue un creuset pour l’innovation dans les drones, accélérant les capacités et les tactiques des drones. Bien que les systèmes de neutralisation comme le brouillage radio, le brouillage des signaux GPS et les effecteurs cinétiques soient déployés le long des lignes de bataille, ces systèmes sont coûteux et ont un déploiement limité dans les applications de sécurité publique.
Systèmes d'imagerie EO/IR pour la détection de drones
Les capteurs électro-optiques (EO) économiques offrent une résolution élevée et des objectifs à focale appropriée. Les capteurs infrarouges passifs (IR) sont sensibles aux émissions de photons thermiques au lieu de la lumière visible, ce qui rend l’IR idéal pour les opérations 24 h/24, 7 j/7. Les caméras EO ont une résolution angulaire plus élevée, ce qui se traduit directement en pixels sur la cible : il s’agit d’un paramètre système essentiel pour la détection précoce des drones. Cependant, le SNR des pixels EO sur un petit drone est souvent faible en raison du contraste limité avec un fond de ciel. Les caméras IR peuvent souvent détecter les mouvements de drones représentés par un cluster de 2 x 2 pixels, étant donné l’arrière-plan froid du ciel. De plus, les indices de classification, y compris la forme, les motifs de mouvement et les signatures thermiques, aident l’IR à distinguer les drones des oiseaux, des avions et de l’encombrement pour minimiser les faux positifs, ce qui diminue souvent l’efficacité des systèmes d’imagerie.
Considérations relatives à la conception de la solution C-UAS
Les systèmes de détection C-UAS se répartissent en deux catégories de coûts et de performances distinctes : coût inférieur et performances élevées. Les systèmes de détection à moindre coût, uniquement par imagerie, avec une distance de détection par drone < 1 000 mètres intègrent des capteurs non refroidis EO et IR à ondes longues (LWIR) avec des objectifs à focale fixe et coûtent entre 50 000 et 150 000 $. Ces systèmes sont généralement limités à un champ de vision (FOV) fixe ou à un balayage horizontal de 90 à 180 degrés, ce qui est utile pour la surveillance périmétrique. Les systèmes de détection multicapteurs avancés et hautes performances avec une portée > 1 000 mètres intègrent des caméras IR EO et ondes moyennes refroidies (MWIR) avec une optique et un radar à zoom continu (CZ). Ces systèmes coûtent entre 150 000 et 1 million de dollars et peuvent être configurés pour fournir un champ de vision complet à 360 degrés pour une perception maximale de la situation.
Les solutions C-UAS à moindre coût comprennent généralement les éléments suivants :
- Caméras infrarouges EO et LWIR non refroidies avec focale longue ou optique de zoom
- Montage fixe ou panoramique et inclinable
- Ordinateur intégré pour la détection et le suivi des objets
- Triompher du système, généralement en cas de bourrage RF
Les solutions C-UAS hautes performances comprennent généralement les éléments suivants :
- Caméras EO et MWIR refroidies avec optique CZ longue portée
- Chariot orientable et inclinable ou stabilisé sur les plateformes fixes ou mobiles avec mâts extensibles
- Unités radar haute résolution à large zone utilisées pour le balayage de la caméra pour identifier
- Capteurs acoustiques
- Serveur ou PC
- Vaincre les systèmes – tous les types, y compris la cinétique
 Figure 2. C-UAS à moindre coût
Figure 2. C-UAS à moindre coût
Lors de la sélection d’une caméra EO, il existe de nombreuses spécifications à prendre en compte : couleur contre monochrome, résolutions jusqu’à 200MP et obturateur roulant contre global. Il existe des échanges au niveau du système pour le taux de pixels, le traitement du signal embarqué en périphérie, le taux de bits, la sensibilité et la sélection de l’objectif. Les systèmes EO fournissent une résolution et des pixels 2 à 8 fois plus élevés sur la cible qu'une caméra IR, mais les performances de la plage de détection dépendent du SNR.


Figure 3. LWIR fixe de 73 mm (gauche), LWIR CZ de 14 à 75 mm (centre), MWIR CZ de 15 à 300 mm (droite)
Lors de la sélection d’une caméra thermique LWIR non refroidie, la plupart des systèmes spécifient un capteur de résolution 640 x 512 avec une sensibilité thermique inférieure ou égale à (≤)20 millikelvins (mK) et une optique rapide spécifiée par un nombre f compris entre ƒ0,9 et ƒ1,4. Cela se traduit par une ouverture d’objectif (diamètre) presque égale à la focale, mais il existe une limite de taille pratique aux distances focales et aux plages de zoom plus longues. Il existe également un point de croisement des coûts entre le LWIR non refroidi et le MWIR refroidi à des distances focales supérieures à environ 250 mm.
Les systèmes MWIR d'aujourd'hui intègrent des refroidisseurs compacts à cycle fermé avec un temps moyen de défaillance (MTTF) pouvant atteindre 27 000 heures qui fonctionnent à faible puissance. Étant donné que cette technologie de capteur est beaucoup plus sensible que le LWIR non refroidi, des optiques aussi lentes que ƒ5,5 peuvent être utilisées, permettant des focales de plus de 1 000 mm tout en maintenant l’assemblage de l’objectif à une taille et un coût gérables. Les capteurs MWIR refroidis d’aujourd’hui ont des pixels de 8 microns avec des résolutions allant jusqu’à 1 280 x 1 024 et une sensibilité de 30 mk.
Indication de cible mobile EO/IR à faible SNR
Les systèmes C-UAS EO/IR utilisent des algorithmes d’indication de cible mobile (MTI) comme première étape, à l’aide de techniques telles que la différence d’images ou la différence temporelle et la soustraction d’arrière-plan. Près de la limite de détection, le bruit est indifférenciable du mouvement, et les fluctuations du bruit au niveau des pixels peuvent ressembler à de petits objets en mouvement d’une image à l’autre, en particulier sous un gain élevé ou une faible luminosité. Les mouvements de fond, y compris les feuillages en mouvement, les nuages, l’eau, la chaleur scintillante et les ombres, génèrent un « faux mouvement ». L’augmentation des seuils de détection permet de gérer les faux positifs, mais peut supprimer de manière disproportionnée les véritables détections à la périphérie de la visibilité.
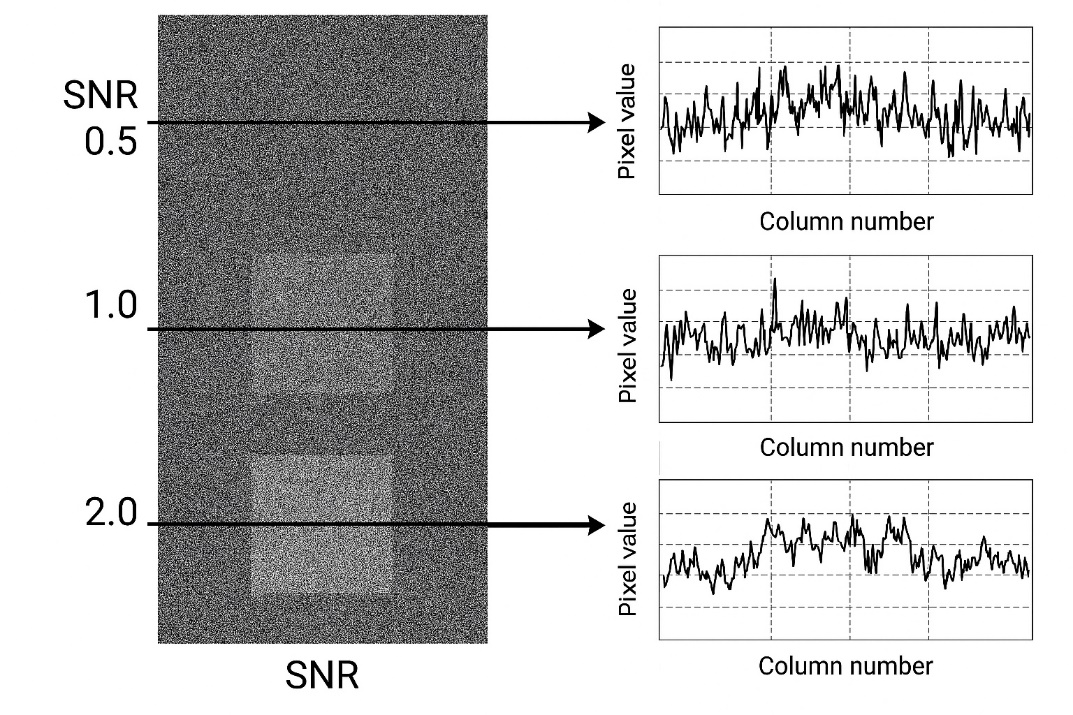
Figure 4. Exemple de graphique SNR
Les détections MTI sont sujettes à des faux positifs importants. Il est recommandé d’accumuler les détections MTI et de quantifier les détections dans une hiérarchie. L’utilisateur peut ensuite déterminer la sensibilité du système par rapport aux détections précoces et aux faux positifs acceptables. La caméra produit de nombreux « ballons » bruyants ou micro-pistes qui doivent être confirmés. En fonctionnement, le MTI à la limite de détection agit souvent comme un générateur candidat pour un détecteur d’objet IA et un traceur de cible.
Détection et suivi des cibles à l'aide de détecteurs d'objets EO/IR
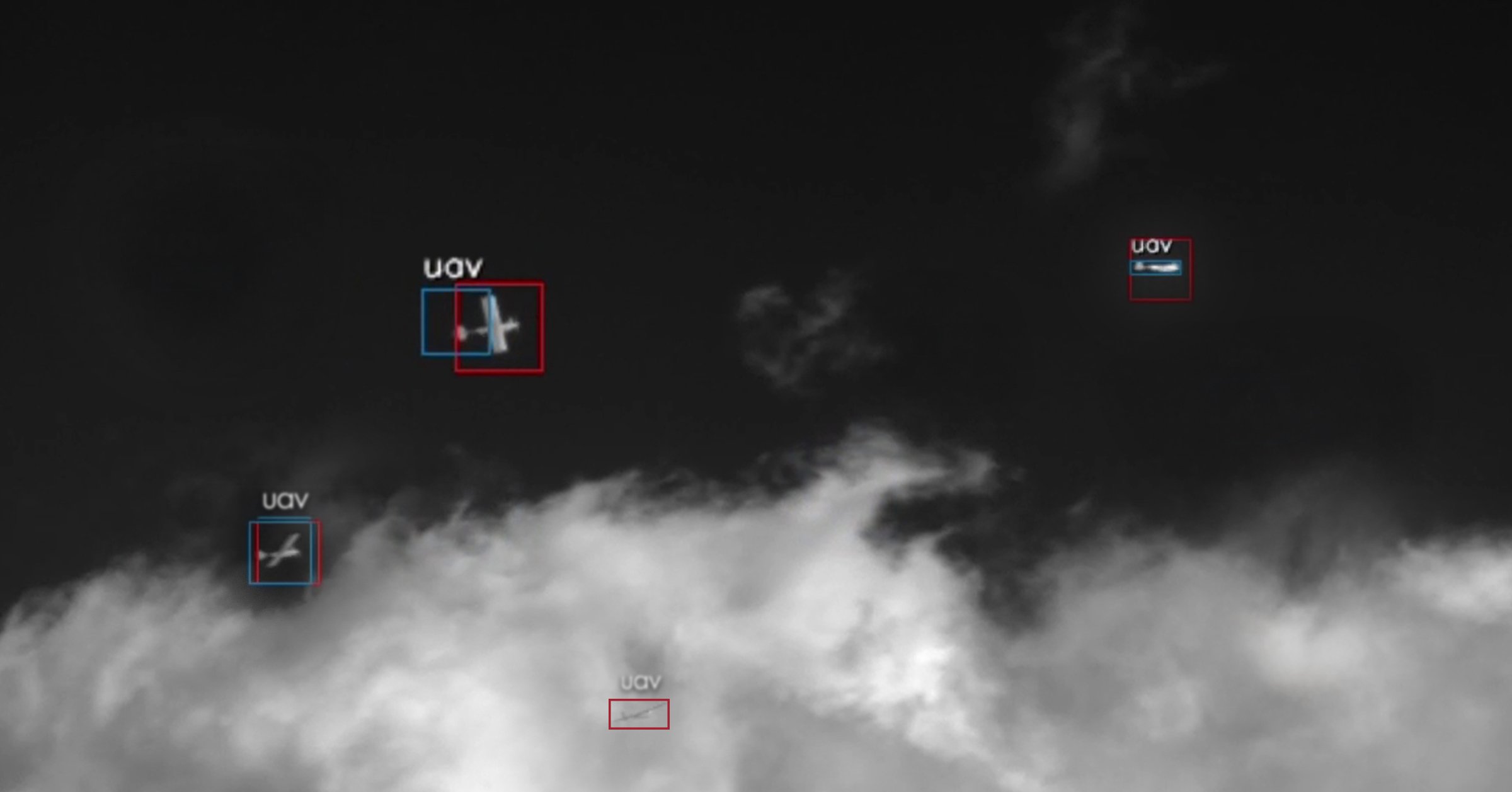
Les détecteurs d’objets basés sur l’IA et l’apprentissage profond sont largement utilisés pour la détection de drones dans les systèmes vidéo EO/IR et peuvent suivre la même ontologie que les classes de perception humaine de détection, de reconnaissance et d’identification. Elles intègrent l’extraction de fonctionnalités à plusieurs échelles :
- Détection (>10x10 pixels) : Classificateurs généralisés (drone vs oiseau vs avion) et localisation (encadré de délimitation) pour les cibles de petite à grande taille sur la base de données d’apprentissage limitées
- Reconnaissance (~20 x 10 pixels) : Classificateurs à grain fin pour les classes cibles telles que les quadcoptères, les drones à aile fixe et les avions ISR aériens
- Identification (~30 x 20 pixels) : Classificateurs à grain fin basés sur des données d’apprentissage haute résolution étendues de classes spécifiques à l’application telles que Shahed, la marque et le modèle de quadcoptères, et les cibles fixes de rôdage des ailes

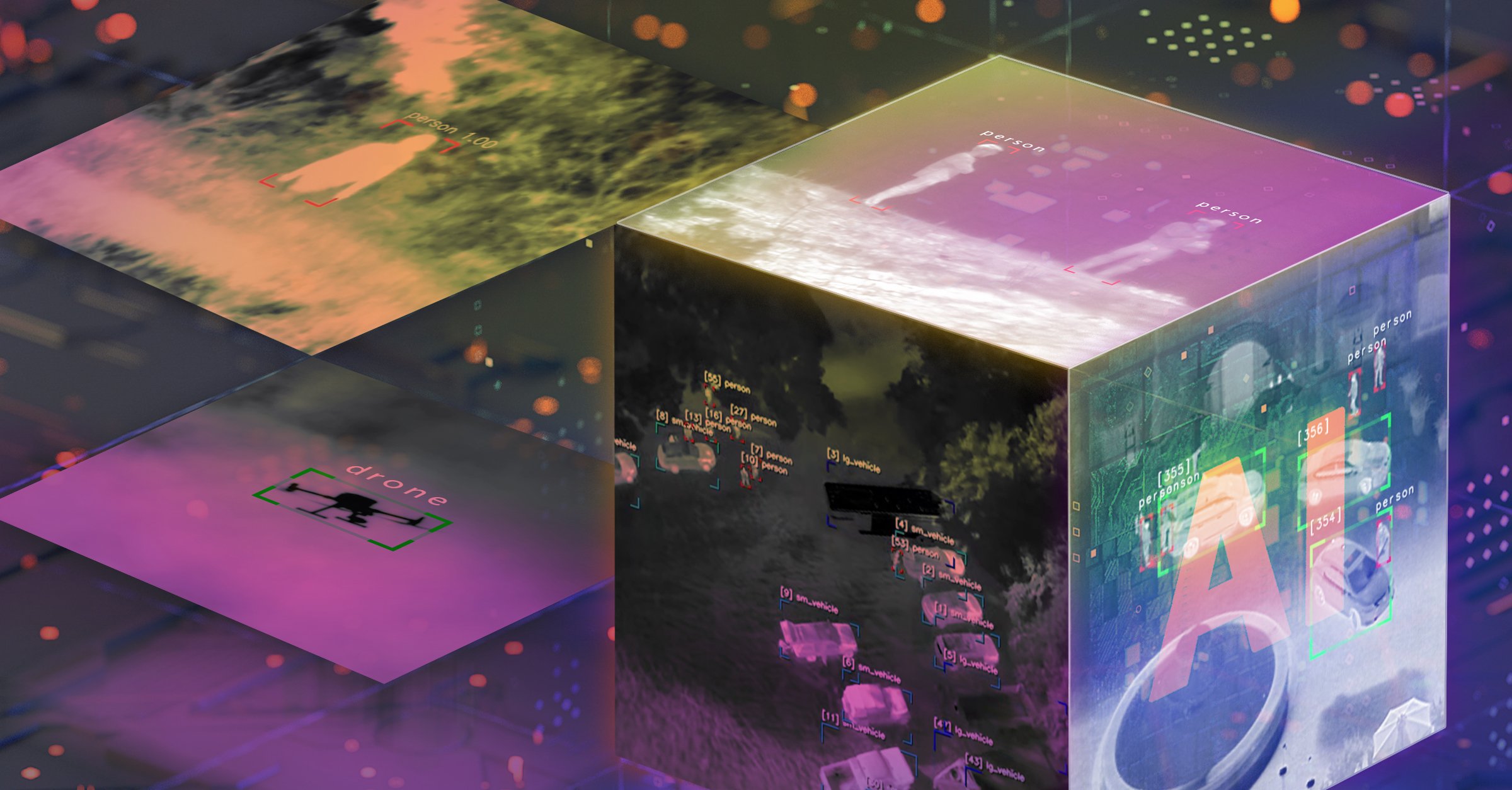
Figure 5. Pipeline vidéo de détection de drones
Limites de détection pour EO/IR
Pour les drones à longue portée, les performances EO/IR sont souvent limitées en SNR et en résolution, ce qui force le système à fonctionner près de la limite de détection. Pour un petit quadcoptère ou un drone à aile fixe, la taille angulaire à longue portée peut être seulement de quelques pixels ou même de sous-pixels. À ce moment-là, la taille apparente du drone est comparable ou inférieure à la fonction d’étalement de points (PSF) de l’optique. Les effets atmosphériques, y compris la diffusion, la brume et les turbulences, peuvent réduire davantage le contraste et introduire un flou aléatoire. Les conditions de limite de détection correspondent souvent à :
- SNR : Faible SNR (1 à 3) au niveau du pixel ou du petit patch
- Zone : Zone apparente très petite (< 20 pixels)
- Arrière-plan : Visibilité intermittente lorsque le drone traverse des arrière-plans complexes, par exemple des arbres, des bâtiments, des nuages, etc.
La plupart des détecteurs d’objets se dégradent gravement lorsque l’objet est en dessous d’environ 10 × 10 pixels. Avec 3 × 3 ou jusqu’à 5 × 5 pixels, le réseau a très peu de détails, les indices de forme sont limités, la texture est inexistante et seul le mouvement brut/le contraste reste. Si la formation réseau n’inclut pas de cibles très petites et bruyantes, le détecteur manquera des cibles ou produira des sorties instables. Les détecteurs entraînés à l’aide d’images diurnes propres, d’arrière-plans spécifiques et de cibles à fort contraste peuvent être particulièrement mis à l’épreuve ou échouer dans des conditions de faible luminosité ou de nuit, de brouillard ou d’humidité, et de variations d’arrière-plan, par exemple, dans le désert ou en ville ou en mer.
À la limite de détection, toute discordance entre les distributions de formation et de déploiement est amplifiée. Les pratiques d’étiquetage et d’annotation des données de formation sont très importantes pour les très petites cibles. Les annotations manuelles peuvent être sujettes aux erreurs. Les cadres de délimitation peuvent ne pas correspondre à la cible réelle et peuvent manquer des cibles entièrement à la plage extrême. Cela introduit un bruit d’étiquette qui peut confondre le détecteur et limiter sa capacité à apprendre de fines distinctions à faible SNR.
De plus, les données d’apprentissage comprennent rarement des exemples de petits drones fortement flous ; la plupart des réseaux CNN sont biaisés vers des cibles nettes ou modérément floues. Le flou et le mouvement de la caméra sont des contraintes majeures pour la détection des drones EO/IR, en particulier à longue portée ou sur les plateformes mobiles. Les pipelines de suivi par détection reposent sur des détections qui sont cohérentes en position et en taille. Le flou provoque une instabilité et une variabilité de taille, ce qui rompt l’association des données. Les traceurs classiques, par exemple, les fonctionnalités KLT ou la correspondance de modèles, ont des difficultés lorsque l’apparence interne du modèle change considérablement en raison de la direction et de l’amplitude floues.
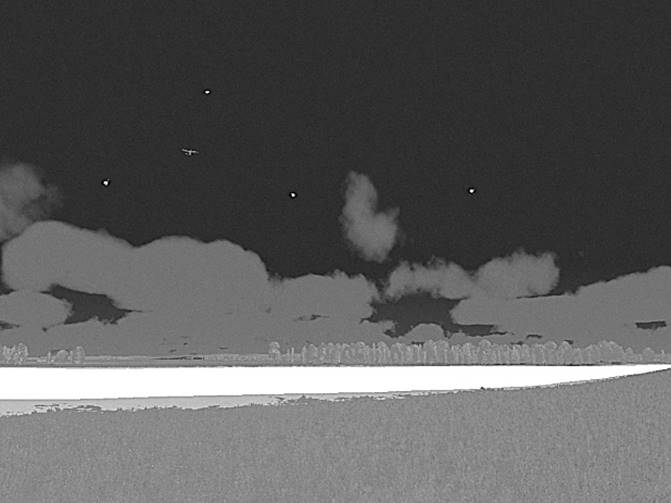

Figure 6. Simulation synthétique EO/IR avec aile fixe et quadcoptères à portée
Pour améliorer les performances, les équipes de développement peuvent utiliser l’augmentation des données, y compris la mise à l’échelle, l’injection de bruit, le flou et les changements d’éclairage. La formation sur les données synthétiques permet de transformer les modèles de drones en arrière-plans réalistes et en exemples négatifs d’oiseaux, d’avions et d’encombrement. Les détecteurs multi-trames ou sensibles aux pistes peuvent être utilisés à l’aide de séquences au lieu de trames uniques.
Traitement du signal d'image EO/IR
L’ISP pour les systèmes de caméras EO/IR fait référence à l’ensemble d’algorithmes et de fonctions matérielles qui convertissent les données brutes des capteurs en images utilisables de haute qualité qui prennent en charge la détection, la reconnaissance, l’identification, la mesure et la prise de décision automatisée. Dans les systèmes EO/IR, en particulier les caméras IR thermiques, la sortie brute de la matrice à plan focal (FPA) est bruyante, non linéaire et non corrigée. ISP transforme ces données brutes en images stables, étalonnées et visuellement optimisées en temps réel. Les performances et la fiabilité du SNR et du réseau dépendent de la qualité de l’ISP pour améliorer la détection, la reconnaissance et l’identification (DRI) des cibles. Teledyne FLIR OEM a développé des algorithmes IR ISP pour améliorer le SNR et aux limites de détection (~2 x 1,5 pixels) qui augmentent la portée pour initier le suivi des drones jusqu’à 20 %. Pour en savoir plus, rendez-vous sur www.oem.flir.com/prism-family.
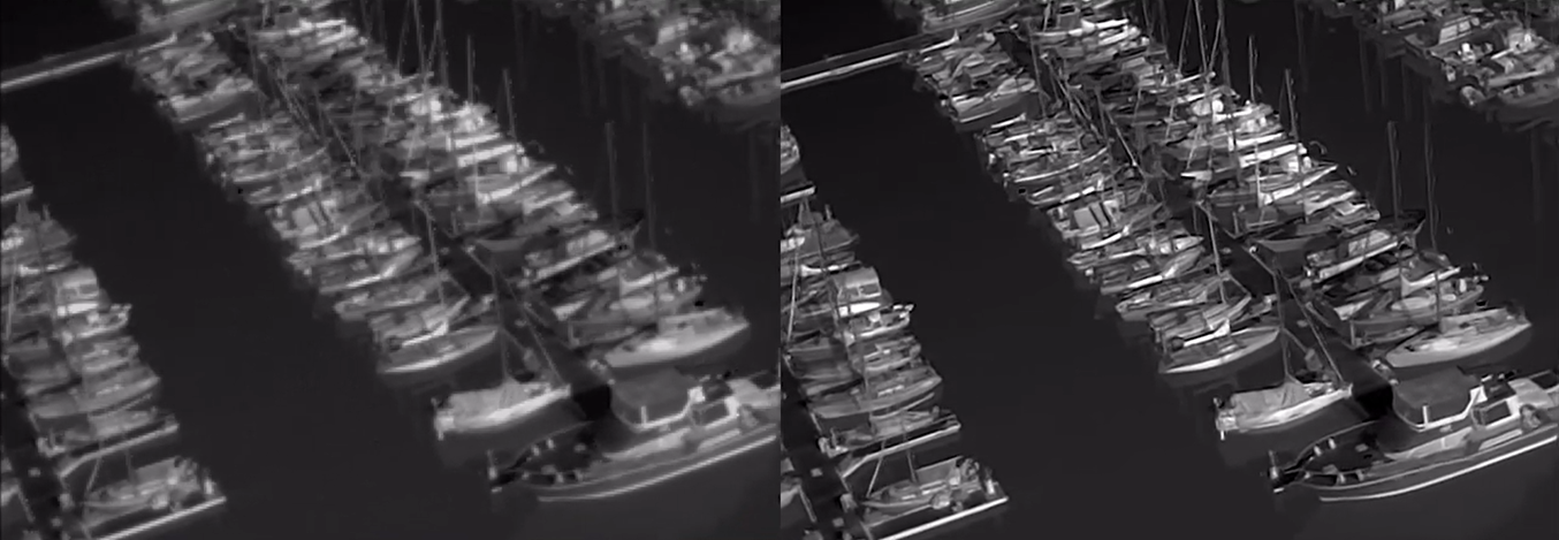
Figure 7. Exemple de super résolution OEM ISP Teledyne FLIR
Articles connexes
-
 Notice d’application
Notice d’application
A Guide on Cost-Effective Thermal Lens Integration: What to Know for Defense and Autonomous Vehicle Applications
En savoir plus -
 Livre blanc
Livre blanc
AI Detection, Target Tracking, and Computational Imaging on Embedded Processors
En savoir plus -
 Article
Article
Simplify MWIR Development with Neutrino Featuring InVeo Electronics
En savoir plus