Cómo aplicar el deformado en Lepton® 3.1R y Lepton UW
1 Introducción
Los Lepton 3.1R y Lepton UW de infrarrojos (IR) utilizan un campo de visión amplio (WFOV) de 95° y una lente WFOV de 160°, respectivamente. La distorsión del barril la crea la lente WFOV, lo que hace que el centro de la imagen se magnifique ligeramente más que los bordes. Eso hace que parezca que las líneas rectas se curvan alrededor del borde de la imagen. La distorsión del barril no es deseable para muchas aplicaciones de imágenes. Esta nota de aplicación describe la aplicación de la corrección de distorsión (desconformación) en las salidas Lepton 3.1R y Lepton UW utilizando funciones integradas OpenCV.

2 Distorsión de imagen
2.1 Descripción general
Una lente WFOV permite al generador de imágenes capturar más en una escena, pero provocará distorsión, lo que hará que los objetos parezcan deformados. Por lo general, pueden existir dos tipos de distorsión en una cámara: radial y tangencial. La distorsión radial es cuando las líneas rectas se curvan hacia dentro o hacia fuera desde el centro, mientras que la distorsión tangencial es cuando la lente se inclina con respecto al plano de la imagen y la imagen parece sesgada. Para solucionar la distorsión de la lente, calibre la cámara para calcular las matrices de transformación, que corrigen la asignación de la cámara en el plano de imagen.
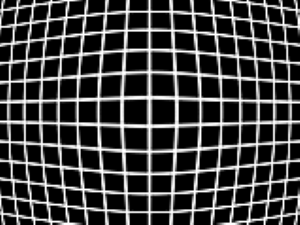
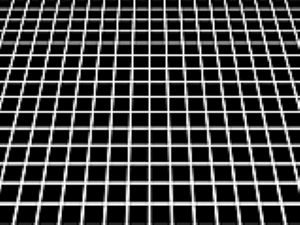
FIGURA 1. DISTORSIÓN RADIAL (IZQUIERDA) Y DISTORSIÓN TANGENCIAL (DERECHA)
El procedimiento de calibración varía ligeramente matemáticamente entre Lepton 3.1R y Lepton UW. Tienen diferentes lentes, por lo que no capturan imágenes del mismo tipo de distorsión geométrica. Aunque ambas parecen tener distorsión radial, las imágenes de Lepton 3.1R consisten en bordes lineales, mientras que Lepton UW tiene bordes circulares, comúnmente conocidos como el efecto ojo de pez. El mapeo del contenido de la escena en líneas rectas para Lepton UW es más complejo debido a los bordes extremadamente deformados. Se incorporan diferentes modelos de distorsión correspondientes al tipo de lente para la calibración para compensar esta distinción: un modelo de distorsión rectilínea de gran angular para Lepton 3.1R y un modelo de distorsión de ojo de pez para Lepton UW.
2.2 Aplicación de la transformación de desconvergencia
Para corregir cualquier distorsión de la lente con el método de OpenCV, las cámaras se calibran capturando patrones de prueba para modelar la distorsión. Capturar patrones de calibración utilizando una cámara de IR es un desafío, por lo que se recomienda utilizar las matrices predeterminadas que caracterizan la distorsión de la cámara a continuación. En la sección 2.3 se describe una breve guía sobre cómo tomar capturas del patrón de calibración.
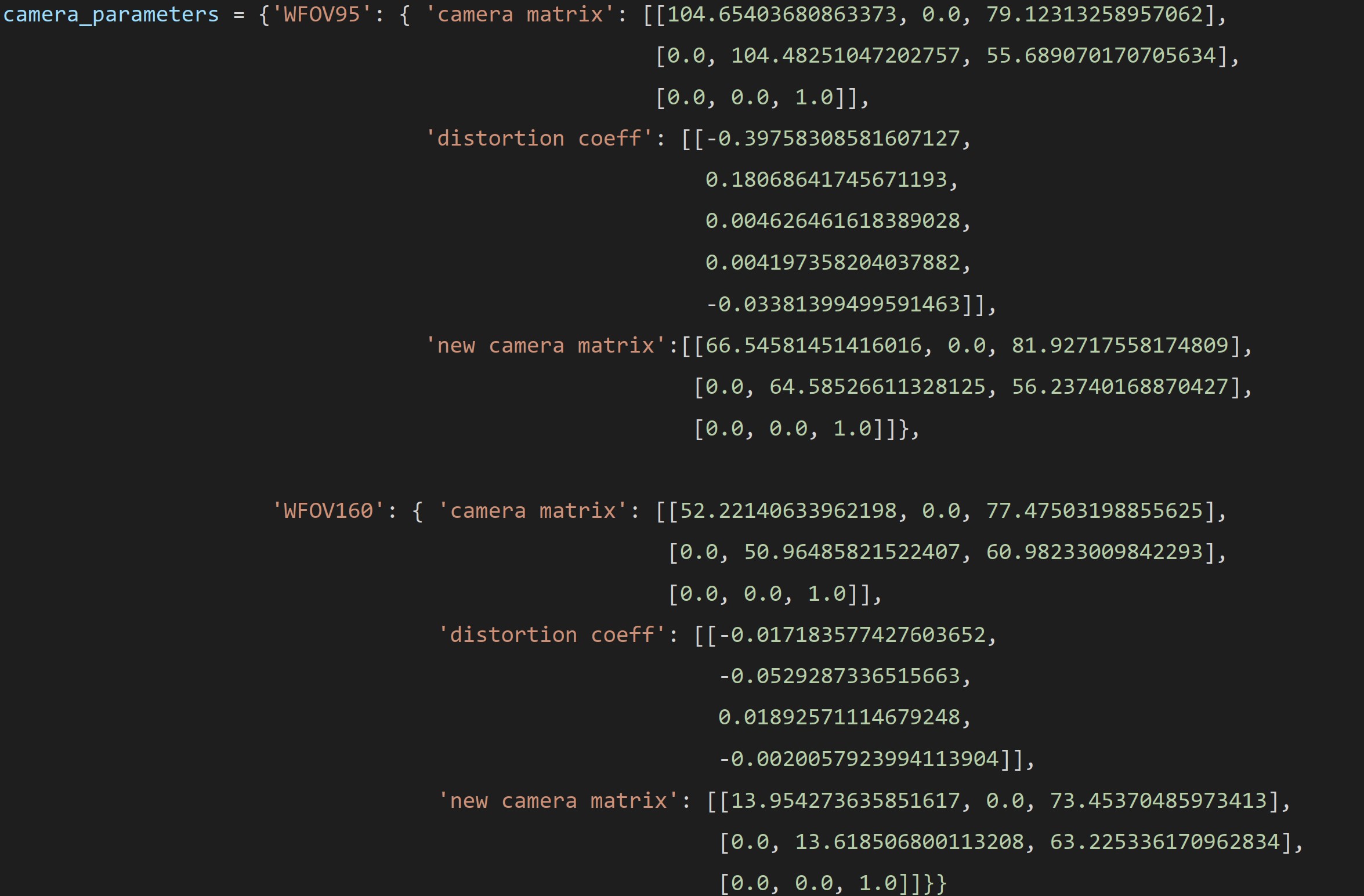
FIGURA 2. MATRIZ DE LA CÁMARA
Estas matrices, junto con la imagen de entrada, se transmiten como imágenes de argumento a la siguiente función integrada de OpenCV para corregir la asignación de plano de cámara a imagen. En la sección 2.4 se proporciona un código de muestra en Python para su demostración.
Lepton 3.1R:
Lepton UW:

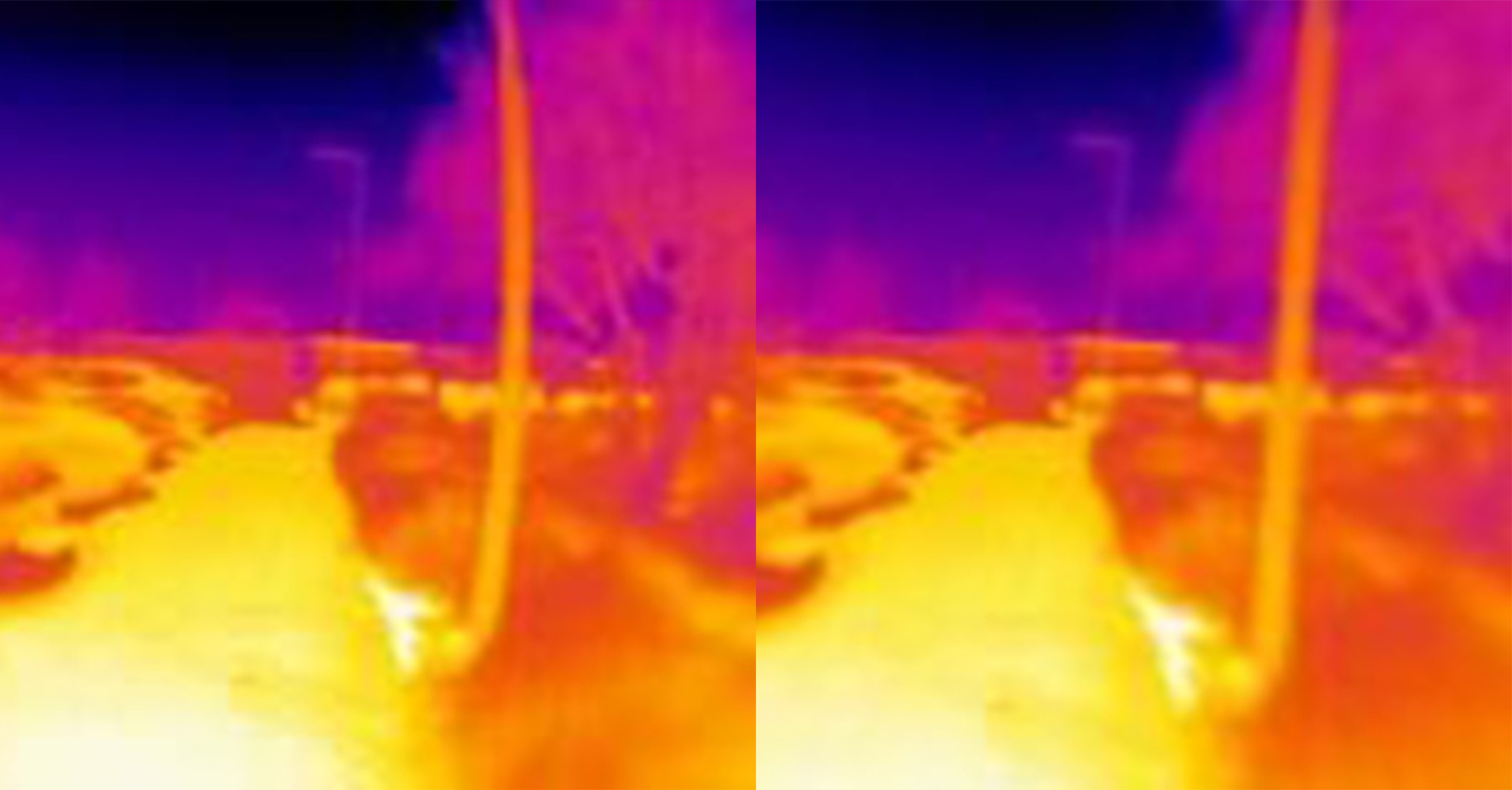
Observe que hay una matriz de cámara y una nueva matriz de cámara. Ambos representan parámetros intrínsecos de la cámara; la única diferencia es que la matriz de la cámara define los parámetros intrínsecos originales de la cámara, mientras que la nueva matriz de la cámara escala y cambia la matriz original de la cámara. Sin especificar la nueva matriz de cámara en la función de distorsiones, utiliza la matriz de cámara de forma predeterminada, que genera una imagen rectilínea con el mismo IFOV que su entrada. La compensación de obtener líneas rectas es que se pierden algunos píxeles en las esquinas de la imagen de entrada. La aplicación de la nueva matriz de cámara de la versión de todos los píxeles mostrada anteriormente proporciona la opción de retener todos los píxeles de la entrada, pero introduce píxeles negros alrededor de los bordes. Las Figuras 3 y 4 muestran la entrada de muestra y las posibles salidas.
![]()
FIGURA 3. LEPTON 3.1R - ORIGINAL (IZQUIERDA), SALIDA RECTILÍNEA (CENTRO) Y SALIDA DE VERSIÓN DE TODOS LOS PÍXELES (DERECHA)


![]()
FIGURA 4. LEPTON UW - ORIGINAL (IZQUIERDA), SALIDA RECTILÍNEA (CENTRO) Y SALIDA DE VERSIÓN DE TODOS LOS PÍXELES (DERECHA)
2.3 Calibración de la cámara
Dado que el sitio web de OpenCV proporciona una explicación exhaustiva y un código de aplicación de muestra del proceso de calibración, esta nota de aplicación no cubre los detalles. La documentación se puede encontrar en https://docs.opencv.org/3.4/d4/d94/tutorial_camera_calibration.html.
Como se introdujo en la sección 2.2, tomar capturas de patrones de calibración en IR no es sencillo. Siga la siguiente guía para realizar capturas eficaces para la calibración de cámaras de IR.
1. Configuración
- Utilice un patrón de calibración de rejilla circular, ya que no es ideal mostrar un tablero de ajedrez térmico. Las rejillas circulares asimétricas o simétricas funcionan.
- Se recomienda una rejilla circular de 8 x 8.
- Una impresión en papel del patrón de calibración pegado en cartón e iluminado brevemente con luces de salida de alta energía, o el sol puede crear contraste térmico.
2. Toma de las capturas
- Tenga al menos una rejilla circular de 6x6 para Lepton 3.1R y una rejilla circular de 4x4 para Lepton UW visible en la captura.
- Algunos círculos pueden estar borrosos cerca de los bordes de la imagen debido al WFOV.
- Cada captura de la rejilla circular debe ocupar solo partes del campo de visión.
- La recopilación de capturas debe abarcar la mayoría de las áreas del campo de visión, es decir, una o dos capturas de la rejilla circular cerca del centro y de ocho a diez capturas alrededor del borde del campo de visión.
- De diez a doce capturas en total proporcionarán una calibración optimizada y las capturas adicionales no son ventajosas.
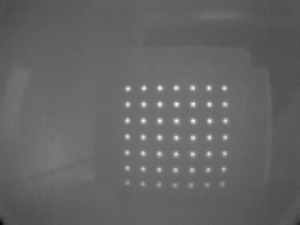
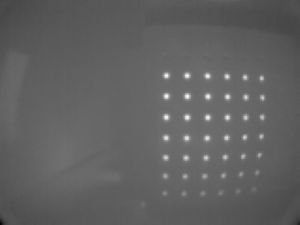
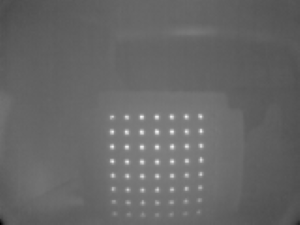
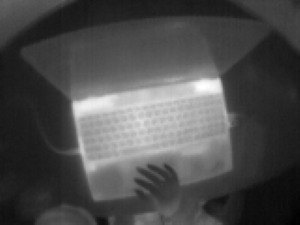
FIGURA 5. CAPTURAS DE PATRONES DE CALIBRACIÓN DE LEPTÓN 3.1R DE EJEMPLO DE CENTRO (IZQUIERDA), INFERIOR DERECHA (CENTRO) E INFERIOR CENTRAL (DERECHA)
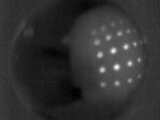
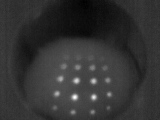
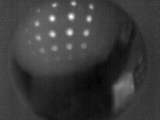
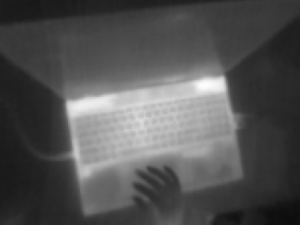
FIGURA 6. CAPTURAS DE PATRONES DE CALIBRACIÓN DE LEPTÓN UW DE EJEMPLO CENTRAL (IZQUIERDA), INFERIOR DERECHA (CENTRO) Y INFERIOR CENTRAL (DERECHA)
2.4 Soporte
El script de muestra Lepton_Dewarp_example.py1 se puede descargar aquí.
Para obtener asistencia técnica, visite el Centro de asistencia de FLIR en http://support.flir.com.
