Mission‑Autonomous Pixel Lock for FPV Drones
Evolving Terminal Guidance into Adaptive, Resilient Engagement Architecture
Embedded software and high-performance silicon are meeting today’s requirements for Automated Target Recognition (ATR), tracking, and homing in defense applications such as smart missiles, drones, and loitering munitions.
To sustain success, especially in contested theaters, systems must leverage pixel‑lock–based terminal guidance. This capability has emerged as a critical feature in contemporary uncrewed aircraft systems (UAS), particularly those intended for first‑person‑view (FPV) and attritable mission profiles as described in the U.S. Department of War’s Drone Dominance program, which intends to purchase over 300,000 drones that can produce lethal effects in the toughest battlefield environments.[1]

Figure 1. Notional FPV Attack Drone
Many of the traditional systems are typically optimized for the narrowly scoped task of visually guiding a platform to a selected target during the final phase of flight. In controlled conditions and at short engagement ranges, these “lock‑and‑fly” approaches can be effective. However, limited hit rates reported from the Ukraine war due to electronic warfare (EW) and human error in the final seconds, modern operational environments, and updated performance requirements increasingly expose the limitations of continuous pilot control and terminal‑only guidance.
Missions are now characterized by rapidly changing geometry, partial observability, evolving rules of engagement, and contested conditions that demand real‑time adaptation. An autonomy framework offers an alternative architecture: rather than treating pixel‑lock as an isolated terminal capability, visual engagement is integrated into a mission‑level autonomy stack responsible for perception, decision‑making, and vehicle control across the mission lifecycle. In this construct, pixel‑lock serves mission intent rather than defining the system. Through the lens of cost per effect, a significantly higher strike probability than less reliable alternatives—especially those that fail in contested environments—can deliver substantial value.
[1]https://dronedominance.mil/leaderboard.html?utm_source=newsletter&utm_medium=email&utm_campaign=newsletter_axiosfutureofdefense&stream=top
From Terminal Guidance to Supervisory Logic: Mission‑Autonomous Pixel‑Lock
Traditional pixel‑lock systems typically exhibit binary behavior: once a target is selected and locked, the vehicle commits to a direct guidance solution until impact or track loss. This architecture provides limited ability to reassess engagement validity or recover from degraded conditions. 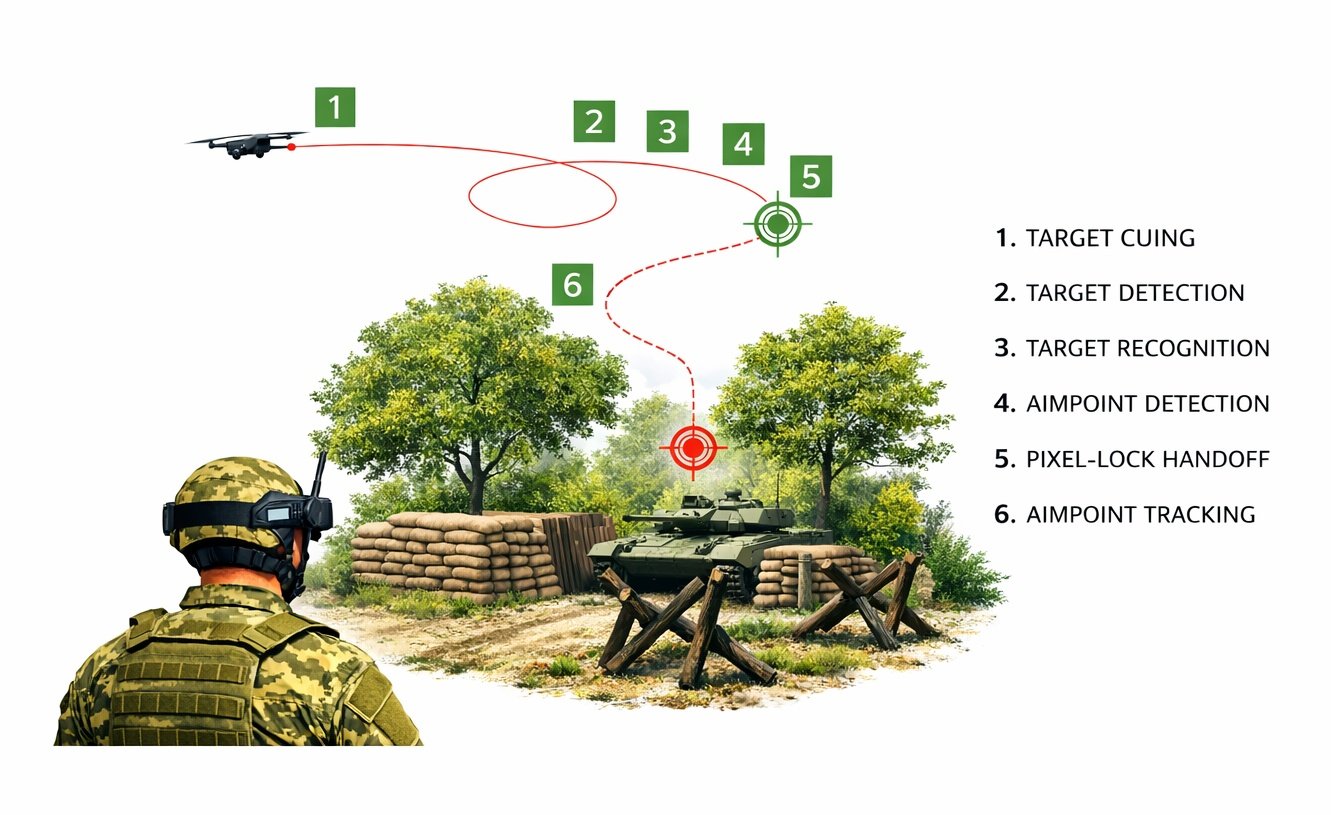
Figure 2. Autonomy State Diagram Showing Engage, Re‑Plan, and Attack Behaviors
The next phase adds a supervisory mission‑logic layer that continuously evaluates engagement geometry, tracking confidence, navigation state, and operational constraints. With “Mission‑Autonomous Pixel‑Lock,” when engagement criteria are no longer satisfied, the system can autonomously wave off or abort. Importantly, abort behaviors do not imply overall mission termination; instead, the system supports autonomous repositioning, hold patterns, time‑on‑target coordination, or intelligence, surveillance, and reconnaissance (ISR) rendezvous prior to follow‑on engagement.
Table 1. Comparison of Terminal‑Only and Mission‑Autonomous Pixel‑Lock Systems
| Capability | Terminal-Only Pixel-Lock Systems | Mission-Autonomous Pixel Lock |
| Guidance Behavior | Fixed fly-straight terminal guidance | Autonomously wave off, abort, re-plan, or re-attack |
| Tracking Method | Basic visual contrast or template-matching | Advanced ReID tracking with persistent target identity and occlusion recovery |
| Mission Scope | Terminal-only capability | Scales from assisted AI to fully autonomous missions |
| Platform Flexibility | Designed exclusively for one-way FPV attack | Supports assisted and fully autonomous missions on the same hardware |
Architectural Scalability and Dual‑Mode Operational Concept
Most existing systems integrate AI capabilities onto manually piloted FPV platforms, limiting scalability as autonomy requirements change. Mission-Autonomous Pixel Lock presents a departure by featuring an end‑to‑end autonomy architecture from inception, encompassing navigation, mission execution, terminal engagement, and recovery behaviors within a single, unified framework.
Such seamless progression from human‑in‑the‑loop to human‑on‑the‑loop and fully autonomous operations can be achieved through software configuration, avoiding costly and potentially time-consuming hardware redesign. This improved level of software‑defined scalability aligns with phased autonomy initiatives, including programs where early requirements emphasize assisted engagement and later phases demand autonomous mission execution and resilience.
Mission-Autonomous Pixel Lock can also support both assisted FPV handoff operations and fully autonomous missions using a common hardware baseline. Shared vision processing, control loops, and mission logic reduce training burden and logistical complexity while enabling flexibility across mission profiles. Additionally, a dual‑mode design allows a single platform to support both low‑cost attritable missions and advanced autonomous operations that are most often anticipated in later program phases.
Persistent Target Tracking via Re‑Identification (ReID)
Terminal guidance performance is strongly influenced by the robustness of the underlying tracking methodology. Conventional contrast‑based or template‑matching approaches are vulnerable to occlusion and viewpoint variation.
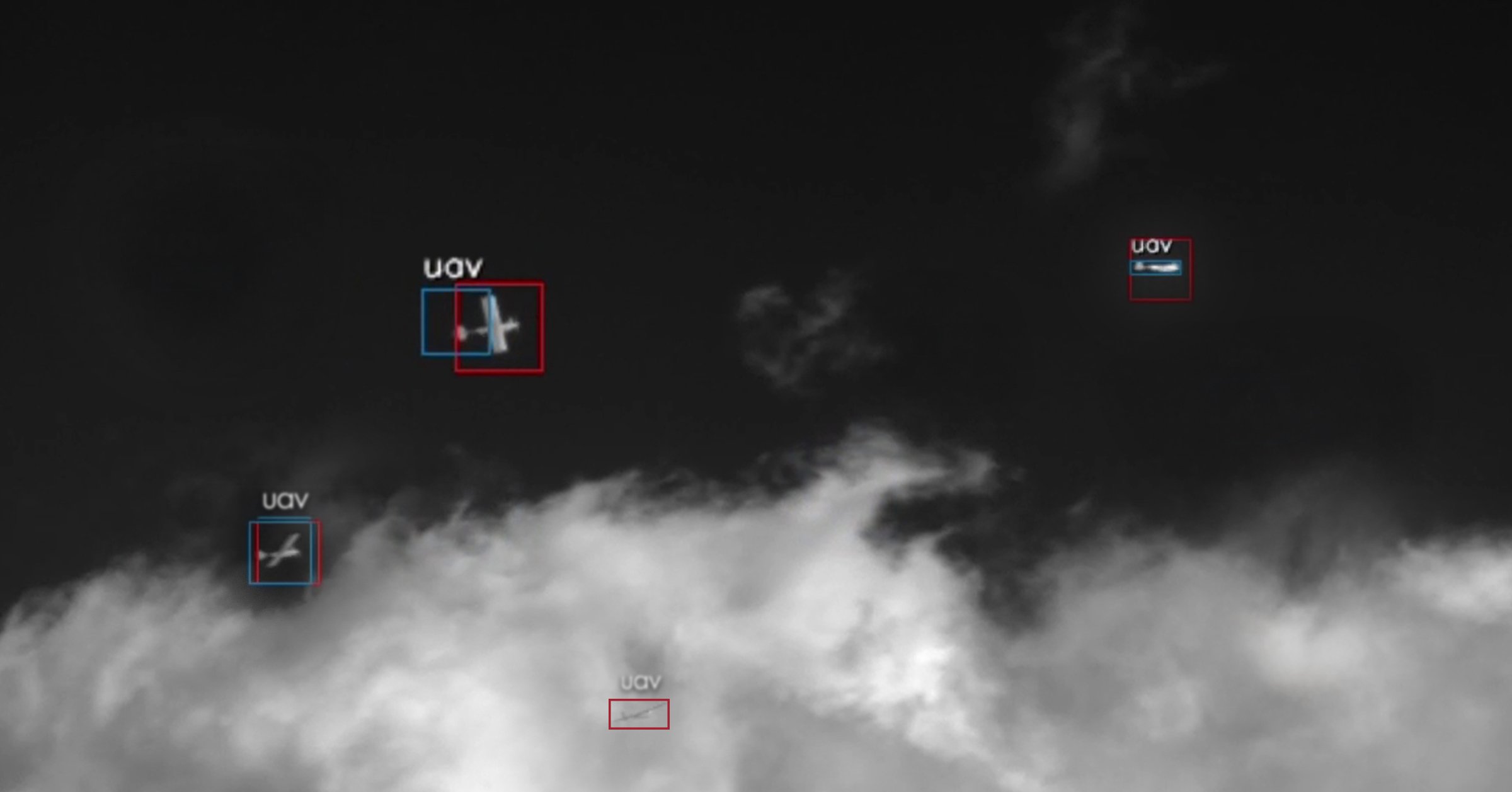
Advanced ReID techniques can be deployed to maintain persistent target identity across time, occlusion, and changing geometry. A “push-to-learn” concept, currently in development, will enable operators to designate a target on the fly while ReID learns the target, enabling persistent tracking. By fusing texture, geometric, and thermal detection features, an improved system will enable reliable target re‑acquisition and selective aimpoint discrimination, supporting more effective terminal decision‑making.
![]()
![]()
![]()
Figure 3. Infared Photo Sequence - ReID‑Based Tracking Continuity Through Occlusion
Optimizing Cost-Per-Effect: A Strategic Advantage
While low‑cost, commodity pixel‑lock modules have entered the market at price points of $100 and below, they typically rely on basic contrast‑based tracking that is easily disrupted by occlusions, clutter, or aggressive target maneuvers. In contrast, Mission‑Autonomous Pixel‑Lock leverages the same high‑performance compute used for a full mission‑autonomy suite, running on platforms such as Qualcomm QCS8550 and NVIDIA Orin NX.
Running a complete Automated Target Recognition (ATR) stack with Re‑Identification (ReID) on high‑performance silicon from Qualcomm and NVIDIA enables terminal‑phase precision that low‑end solutions do not achieve. This hardware foundation allows the system to reliably re‑acquire targets after full occlusion or signal loss, increasing mission success rates. Ultimately, Mission‑Autonomous Pixel‑Lock improves outcomes because it is optimized for cost per effect: by delivering a substantially higher strike probability, the system can be more efficient than prior generations of smart missiles, drones, and loitering munitions.
A New Era of UAS Mission Execution
Operational advantage in contested environments is increasingly derived from adaptability and decision velocity rather than terminal performance alone. By integrating adaptive mission logic, persistent tracking, and scalable autonomy, Mission‑Autonomous Pixel‑Lock shifts the advantage from operator‑centric control to system-level decision-making. This approach supports reduced operator workload, improved mission efficiency, optimized cost per effect, and sustained operational relevance as autonomy requirements evolve.
![]()
Figure 4. Mission‑Autonomous Pixel Lock Operational – Command and Control – Interface
It is no secret that small unmanned systems are critical to military success in theater, as proven by recent conflicts across the globe. Here, Mission‑Autonomous Pixel‑Lock enables guided weapon systems to achieve more effective mission execution through intelligent supervision within a single, closed‑loop autonomy platform. It transforms pixel‑lock from a terminal guidance aid into a true mission-level autonomy capability, providing a seamless path from assisted target engagement to full autonomy.
To learn more about Prism SKR, a closed-loop, perception-driven ATR and autonomy software from Teledyne FLIR OEM with advanced search, 3D aimpoint selection, mission-autonomous pixel lock, and terrain-aware operations, visit: oem.flir.com/skr.
-
 Whitepaper
Whitepaper
Thermal Infrared Sensor Design Considerations for Counter-UAS Defense
Learn more -
 Application Note
Application Note
A Guide on Cost-Effective Thermal Lens Integration: What to Know for Defense and Autonomous Vehicle Applications
Learn more -
 Whitepaper
Whitepaper
How to Use Automated Synthetic Data Generation in AI Model Development for Object Detection